Equation of Angular Motion
The equation of angular motion relates the angular displacement, angular velocity, and angular acceleration of an object undergoing rotational motion. It is analogous to the equations of linear motion. The equation of angular motion is:
θ = θ0+ ω0t + (1/2)αt2
where:
Relation between Linear and Angular Kinematics
The relation between linear and angular kinematics allows us to connect the motion of an object in a straight line (linear motion) with its rotational motion. This relation is based on the concept of the radius (or moment arm) and the angular displacement.
The relation between linear and angular kinematics is:
s = rθ
where:
This relation allows us to convert between linear and angular quantities, providing a connection between the linear motion of an object and its rotational motion.
Kinetic Energy of Rotation of a Rigid Body
The kinetic energy of rotation of a rigid body is the energy associated with its rotational motion. It depends on the moment of inertia and the angular velocity of the body. The formula to calculate the kinetic energy of rotation is:
K.E. = (1/2) Iω²
where:
The moment of inertia (I) represents the distribution of mass around the axis of rotation and depends on the body‘s shape and mass distribution. The angular velocity (ω) is the rate at which the body rotates around its axis.
The kinetic energy of rotation can be thought of as the rotational equivalent of linear kinetic energy. It represents the energy associated with the rotational motion of the rigid body.
Moment of Inertia
The moment of inertia, denoted by I, is a physical property of a rigid body that quantifies its resistance to rotational motion. It depends on the mass distribution and the axis of rotation. The formula to calculate the moment of inertia for a given body is:
I = ∫r² dm
where:
The moment of inertia depends on the shape, mass distribution, and axis of rotation of the body. Different bodies have different formulas for calculating their moment of inertia, such as for simple shapes like a point mass, thin rod, or a solid sphere.
Radius of Gyration
The radius of gyration, denoted by k, is a property that represents the distribution of mass of a rigid body about an axis. It is defined as the distance from the axis of rotation to a point where the entire mass of the body can be considered concentrated, without changing the moment of inertia. The formula to calculate the radius of gyration is:
k = √ (I/m)
where:
The radius of gyration provides a measure of how the mass of a body is distributed around an axis of rotation. It allows us to simplify calculations involving moment of inertia by treating the body as a point mass located at the radius of gyration.
Moment of Inertia of a Uniform Rod (with Derivation)
To calculate the moment of inertia of a uniform rod about an axis perpendicular to its length and passing through one end, we can use the following derivation:
Step 1: Consider an Infinitesimally Small Mass Element
Let‘s consider an infinitesimally small mass element, dm, located at a distance x from the axis of rotation. The mass of this element can be expressed as dm = (m/L) dx, where m is the total mass of the rod and L is its length.
Step 2: Calculate the Moment of Inertia of the Mass Element
The moment of inertia of this mass element about the axis of rotation is given by dI = (dm) x².
Substituting dm = (m/L) dx and x² into the equation, we have:
dI = (m/L) x² dx.
Step 3: Integrate to Find the Total Moment of Inertia
To find the total moment of inertia (I), we integrate the expression for dI over the entire length of the rod (0 to L):
I = ∫dI = ∫ (m/L) x² dx, from x = 0 to x = L.
Step 4: Evaluate the Integral
Solving the integral, we have:
I = (m/L) ∫x² dx, from x = 0 to x = L.
I = (m/L) [x³/3] from x = 0 to x = L.
I = (m/L) [ (L³/3) - (0³/3)].
I = (m/L) (L³/3).
I = (mL²/3).
Step 5: Simplify the Expression
Since the rod is uniform, m = mass of the rod and L = length of the rod, we can simplify the expression:
I = (mL²/3).
Therefore, the moment of inertia of a uniform rod about an axis perpendicular to its length and passing through one end is given by I = mL²/3.
Torque and Angular Acceleration for a Rigid Body
Torque:
Torque is the rotational equivalent of force and is defined as the measure of the tendency of a force to rotate an object about a specific axis. The torque acting on a rigid body is given by the formula:
T = I * α
where:
The torque acting on a rigid body is directly proportional to the product of the moment of inertia and the angular acceleration. It causes the body to undergo rotational motion or change its rotational speed.
Angular Acceleration:
Angular acceleration represents the rate of change of angular velocity of a rotating object. It is defined as the change in angular velocity divided by the change in time. The formula for angular acceleration is:
α = (Δω) / Δt
where:
The angular acceleration of a rigid body is determined by the change in its angular velocity over a specific time interval. It describes how quickly the body‘s rotational speed is changing.
Work and Power in Rotational Motion
In rotational motion, work and power are defined in terms of torque and angular velocity. Here‘s how work and power are related in rotational motion:
Work:
In rotational motion, work is done when a torque is applied to a rigid body, causing it to rotate through an angle. The work done by a torque is given by the formula:
W = τ * θ
where:
The work done by a torque is directly proportional to the product of the torque and the angle of rotation. It measures the energy transferred to the rotating body.
Power:
Power in rotational motion represents the rate at which work is done or the rate at which energy is transferred. It is defined as:
P = (τ * ω)
where:
The power in rotational motion is given by the product of the torque applied and the angular velocity of the rotating body. It quantifies how quickly work is being done or energy is being transferred in rotational motion.
Angular Momentum
Angular momentum is a rotational analog of linear momentum and is a fundamental concept in rotational motion. It represents the measure of the rotational motion of an object around a given axis. The angular momentum of a rotating object is defined as:
L = I * ω
where:
The angular momentum of an object depends on its moment of inertia and angular velocity. It is a vector quantity, and its direction is perpendicular to the plane of rotation.
Conservation of Angular Momentum:
The conservation of angular momentum states that the total angular momentum of a system remains constant if no external torque acts on it. In other words, in the absence of external torques, the angular momentum of a system is conserved.
This conservation principle can be expressed as:
L (initial) = L (final)
which means that the initial angular momentum of a system is equal to the final angular momentum of the system.
Examples of Conservation of Angular Momentum:
1. Ice Skater: When an ice skater is spinning and pulls their arms closer to their body, their moment of inertia decreases. As a result, to conserve angular momentum, their angular velocity increases, causing them to spin faster.
2. Diving: During a dive, divers often perform twists and somersaults in the air. By changing their body position, they can alter their moment of inertia. To maintain angular momentum, they adjust their angular velocity, allowing them to complete the dive with a desired number of rotations.
3. Figure Skating: Figure skaters often perform spins with their arms extended. When they bring their arms closer to their body, their moment of inertia decreases, leading to an increase in angular velocity. This allows them to spin faster and perform intricate moves.
4. Planetary Motion: The conservation of angular momentum plays a crucial role in the motion of planets around the sun. As a planet moves closer to the sun in its orbit, its moment of inertia decreases, resulting in an increase in angular velocity to conserve angular momentum.
5. Gyroscopes: Gyroscopes utilize the conservation of angular momentum to maintain stability. The spinning rotor in a gyroscope maintains its angular momentum, providing stability against external forces.
These examples demonstrate the conservation of angular momentum and how changes in moment of inertia and angular velocity are interconnected to maintain the overall angular momentum of a system.
Equation of Simple Harmonic Motion (SHM)
Simple Harmonic Motion (SHM) is a type of periodic motion where an object oscillates back and forth around an equilibrium position under the influence of a restoring force that is proportional to its displacement. The equation that describes the motion of an object undergoing SHM is:
x (t) = A * cos (ωt + φ)
where:
Derivation of the Equation of SHM:
The equation of SHM can be derived using the principles of Newton‘s second law of motion and Hooke‘s law. Here are the main steps involved in the derivation:
This derived equation represents the motion of an object undergoing simple harmonic motion. It shows how the displacement of the object varies sinusoidally with time, governed by the amplitude, angular frequency, and phase angle.
Energy in Simple Harmonic Motion (SHM)
In simple harmonic motion (SHM), the energy of the system is conserved and can be divided into two components: kinetic energy and potential energy.
Kinetic Energy (KE):
The kinetic energy of an object undergoing SHM can be expressed as:
KE = (1/2) * m * v^2
where:
Since SHM involves oscillatory motion, the velocity of the object can be written as:
v = ω * A * sin (ωt + φ)
where:
Substituting the expression for velocity into the equation for kinetic energy, we get:
KE = (1/2) * m * (ω * A * sin (ωt + φ))^2
KE = (1/2) * m * ω^2 * A^2 * sin^2 (ωt + φ)
Potential Energy (PE):
The potential energy of an object undergoing SHM can be expressed as:
PE = (1/2) * k * x^2
where:
Since SHM involves oscillatory motion, the displacement of the object can be written as:
x (t) = A * cos (ωt + φ)
Substituting the expression for displacement into the equation for potential energy, we get:
PE = (1/2) * k * (A * cos (ωt + φ))^2
PE = (1/2) * k * A^2 * cos^2 (ωt + φ)
Total Mechanical Energy:
The total mechanical energy in SHM is the sum of the kinetic energy and potential energy:
E = KE + PE
E = (1/2) * m * ω^2 * A^2 * sin^2 (ωt + φ) + (1/2) * k * A^2 * cos^2 (ωt + φ)
E = (1/2) * (m * ω^2 * A^2 * sin^2 (ωt + φ) + k * A^2 * cos^2 (ωt + φ))
The above expression represents the total mechanical energy in simple harmonic motion. It shows how the energy of the system is distributed between kinetic energy and potential energy, and how it varies with time as the object oscillates back and forth.
Oscillation of a Mass Suspended from a Coiled Spring
The oscillation of a mass suspended from a coiled spring is a classic example of simple harmonic motion (SHM). It demonstrates the principles of SHM and how energy is transferred between kinetic energy and potential energy. Here‘s how it works:
Setup:
Equilibrium Position:
The equilibrium position is the position where the spring is neither compressed nor stretched. In this position, the force exerted by the spring is zero, and the net force acting on the mass is also zero.
Displacement and Hooke‘s Law:
When the mass is displaced from the equilibrium position, it experiences a restoring force provided by the spring. According to Hooke‘s Law, the magnitude of the restoring force is directly proportional to the displacement from the equilibrium position.
The equation for the restoring force can be written as:
F = -kx
where:
Period and Frequency:
The period, denoted as "T," is the time taken for one complete oscillation. It is the reciprocal of the frequency, denoted as "f."
The period of oscillation for a mass-spring system can be calculated using the equation:
T = 2π√ (m/k)
Energy Transfer:
As the mass oscillates, energy is transferred between kinetic energy (KE) and potential energy (PE).
At the extreme points of the motion (maximum displacement), the mass has maximum potential energy and zero kinetic energy.
At the equilibrium position (zero displacement), the mass has maximum kinetic energy and zero potential energy.
As the mass oscillates, it continues to interchange between potential and kinetic energy, but the total mechanical energy (sum of KE and PE) remains constant throughout the motion.
Applications:
The oscillation of a mass-spring system has various practical applications, such as:
The oscillation of a mass suspended from a coiled spring is a fundamental example of SHM and helps illustrate the principles of energy transfer and the relationship between displacement, force, and oscillation period.
Angular Simple Harmonic Motion (SHM)
Angular Simple Harmonic Motion (SHM) refers to the oscillatory motion exhibited by an object rotating about a fixed axis. It follows similar principles as linear SHM but involves angular quantities such as angular displacement, angular velocity, and angular acceleration. One example of angular SHM is a simple pendulum:
Simple Pendulum
A simple pendulum consists of a mass, known as the bob, suspended from a fixed point by a string or rod. It exhibits oscillatory motion when displaced from its equilibrium position. Here are the key characteristics of a simple pendulum:
Equilibrium Position:
The equilibrium position of a simple pendulum is the vertical position where the bob hangs freely without any external force acting on it. In this position, the string or rod is vertical, and the pendulum is at rest.
Displacement and Restoring Torque:
When the pendulum is displaced from its equilibrium position, it experiences a restoring torque that tries to bring it back to the equilibrium. The restoring torque is directly proportional to the angular displacement.
The equation for the restoring torque can be written as:
τ = -kθ
where:
Period and Frequency:
The period of a simple pendulum, denoted as "T," is the time taken for one complete oscillation. It depends on the length of the pendulum and the acceleration due to gravity (g).
The period of a simple pendulum can be calculated using the equation:
T = 2π√ (L/g)
where:
Energy Transfer:
Similar to linear SHM, energy is transferred between different forms during the motion of a simple pendulum. At the extreme points of the motion (maximum displacement), the pendulum has maximum potential energy and zero kinetic energy. At the equilibrium position (zero displacement), the pendulum has maximum kinetic energy and zero potential energy.
As the pendulum oscillates, it continues to interchange between potential and kinetic energy, but the total mechanical energy (sum of potential and kinetic energy) remains constant throughout the motion.
Applications:
The simple pendulum has various applications, including:
The simple pendulum is a classic example of angular SHM and provides a valuable model for understanding oscillatory motion and energy transfer in rotational systems.
Time Period of Simple Pendulum
To derive the expression for the time period of a simple pendulum, consider a mass (bob) attached to a string or rod of length ‘L‘. The pendulum is displaced from its equilibrium position by an angle ‘θ‘ and released. Here are the steps:
Step 1: Forces Acting on the Bob
Step 2: Restoring Force
mg * sin (θ) = -k * θ
Step 3: Torque and Angular Acceleration
Step 4: Equating Torque and Angular Acceleration
Step 5: Angular Acceleration and Time Period
Step 6: Solution and Time Period
Therefore, the expression for the time period of a simple pendulum is T = 2π * sqrt (L / g), where L is the length of the pendulum and g is the acceleration due to gravity.
Damped Oscillation
In damped oscillation, the amplitude of the oscillating system gradually decreases over time due to the presence of a damping force. This force opposes the motion and dissipates energy from the system. Here are some key points about damped oscillation:
Characteristics:
Types of Damping:
Forced Oscillation
In forced oscillation, an external periodic force is applied to an oscillating system, driving it to oscillate with a frequency different from its natural frequency. Here are some key points about forced oscillation:
Resonance
Understanding damped oscillation, forced oscillation, and resonance is essential in various fields, including engineering, physics, and music, as they play a significant role in the behavior of mechanical and vibrational systems.
Pressure in a Fluid
Pressure in a fluid refers to the force exerted by the fluid per unit area. It is an essential concept in fluid statics and plays a crucial role in determining the behavior of fluids at rest. Here are some key points about pressure in a fluid:
Definition:
Pascal‘s Law:
Pressure Variation in a Fluid:
Buoyancy
Buoyancy refers to the upward force experienced by an object immersed in a fluid, resulting from the difference in pressure exerted on the object‘s surface. It is responsible for the ability of objects to float or sink in fluids. Here are some key points about buoyancy:
Archimedes‘ Principle:
Expression for Buoyant Force:
Understanding pressure in a fluid and buoyancy is crucial for various applications, including hydrodynamics, ship design, and the behavior of objects in liquids and gases.
Surface Tension
Surface tension is a property of liquids that arises due to the cohesive forces between molecules at the surface of the liquid. It is responsible for phenomena such as capillary rise, droplet formation, and the shape of liquid surfaces. Here is the derivation of the expression for surface tension:
Derivation:
Consider a liquid in equilibrium, forming a free surface. Due to the cohesive forces between molecules, there is an inward net force acting on the liquid molecules at the surface.
To derive the expression for surface tension, let‘s consider a hypothetical imaginary line drawn on the liquid surface, forming a loop or contour. We can assume this contour to be a rectangle with sides of length L and width dx.
The net force acting on the vertical sides of the rectangle is balanced by the surface tension force, and it can be approximated as:
Fnet= 2T dx
where T is the surface tension of the liquid.
Now, let‘s consider the horizontal sides of the rectangle. The pressure inside the liquid is uniform, and the pressure at the liquid-air interface is slightly lower due to the surface tension effects. The difference in pressure across the rectangle‘s width is given by:
dP = Pinside- Poutside= -2T/R dx
where R is the radius of curvature of the liquid surface.
Using the relation dP = -dF/A, where dF is the net force acting on the rectangle and A is the area of the rectangle, we can write:
-dF/A = -2T/R dx
dF = 2T/R dx
The total force acting on the rectangle is given by dF = T (2/R) dx.
Integrating this force over the entire contour length L, we get:
F = ∫T (2/R) dx
F = 2T/R ∫dx
F = 2T/R * L
Since F is the force acting on the rectangle, we can consider it as the force required to break the liquid surface. Hence, F is also equal to the force required to separate the liquid along the entire length L of the contour.
Therefore, the expression for surface tension (T) can be derived as:
T = F * R / (2L)
This is the expression for surface tension, which relates the force required to break the liquid surface to the radius of curvature of the surface and the length of the contour.
Surface Energy
Surface energy is the amount of work required to increase the surface area of a liquid by a unit amount. It is closely related to surface tension and provides a measure of the internal energy associated with the liquid‘s surface. Here is the derivation of the expression for surface energy:
Derivation:
The surface energy of a liquid can be defined as the energy required to create a new surface or interface between two phases (such as a liquid and a gas). Let‘s consider a liquid droplet of radius R and surface tension T.
The work done in increasing the surface area of the droplet by dA is given by:
dW = T dA
For a spherical droplet, the surface area is given by A = 4πR2.
dA = d (4πR2) = 8πR dR
dW = T (8πR dR)
Integrating both sides of the equation from 0 to R and denoting the total surface energy as E, we have:
E = ∫dW = ∫T (8πR dR)
E = 8πT ∫R dR
E = 8πT [R2/2]
E = 4πT R2
This is the expression for the surface energy of a liquid droplet, which relates the surface tension (T) and the radius of the droplet (R) to the amount of work required to create the surface.
Surface tension and surface energy play crucial roles in various phenomena, including wetting, bubble formation, and the behavior of fluids in capillary tubes. Understanding these concepts helps in explaining and predicting the behavior of liquids at interfaces and their interactions with solid surfaces.
Angle of Contact
The angle of contact is a fundamental concept in fluid mechanics that describes the angle between the surface of a liquid and the solid surface it comes into contact with. It plays a crucial role in determining the shape and behavior of liquid droplets on different surfaces. Here‘s a discussion on the angle of contact:
Definition:
The angle of contact is defined as the angle between the tangent to the liquid surface at the point of contact and the solid surface beneath it. It is denoted by the symbol θ.
Factors affecting the angle of contact:
The angle of contact depends on various factors, including:
Significance of the angle of contact:
The angle of contact has important implications for various phenomena, such as:
Measurement of the angle of contact:
The angle of contact can be measured using various techniques, such as the sessile drop method or the captive bubble method, where the shape of the liquid droplet or bubble is analyzed to determine the angle.
Understanding the angle of contact is essential for studying wetting phenomena, adhesion, surface tension, and the behavior of fluids on solid surfaces. It provides insights into the interaction between liquids and solids and finds applications in numerous fields, including materials science, chemistry, and engineering.
Capillarity
Capillarity is a phenomenon observed in fluids, particularly in narrow tubes or capillary tubes, where the liquid rises or falls against the force of gravity. It is a result of the balance between cohesive forces within the liquid and adhesive forces between the liquid and the solid surface of the capillary tube. Here‘s an explanation of capillarity and its applications:
Definition:
Capillarity refers to the ability of a liquid to flow or be drawn into a narrow tube or capillary against the force of gravity.
Expression for Capillary Rise or Fall:
The height (h) to which a liquid will rise or fall in a capillary tube can be determined using the following expression:
h = (2T cosθ) / (ρgR)
Where:
Applications of Capillarity:
Capillarity has several practical applications in various fields:
Capillarity is a fascinating phenomenon that demonstrates the intricate interplay between intermolecular forces and surface properties of liquids. Its applications extend to various fields, making it an essential concept in fluid mechanics and everyday life.
Newton‘s Formula for Viscosity
Viscosity is a measure of a fluid‘s resistance to flow. Sir Isaac Newton formulated the relationship between the shear stress and the velocity gradient in a fluid, which is known as Newton‘s formula for viscosity. It can be expressed as follows:
τ = η (dv/dy)
Where:
Coefficient of Viscosity
The coefficient of viscosity (η) represents the internal friction or resistance to flow within a fluid. It is a measure of how "thick" or "sticky" a fluid is. The coefficient of viscosity can be determined using various experimental methods.
Derivation of Newton‘s Formula for Viscosity
To derive Newton‘s formula for viscosity, consider a fluid confined between two parallel plates. The bottom plate is fixed, and the top plate is moving with a constant velocity (v).
Assuming that the fluid layer is sufficiently thin, the velocity gradient (dv/dy) can be assumed to be constant across the fluid layer.
Applying a force (F) parallel to the plates, the fluid experiences a shear stress (τ) due to the applied force.
According to Newton‘s formula for viscosity, the shear stress is directly proportional to the velocity gradient:
τ = η (dv/dy)
This equation states that the shear stress is equal to the product of the coefficient of viscosity and the velocity gradient.
This relationship signifies that the greater the velocity gradient (steep change in velocity with respect to distance), the greater the shear stress, indicating higher fluid viscosity.
By measuring the shear stress and the velocity gradient in various experimental setups, the coefficient of viscosity (η) can be determined for different fluids.
The coefficient of viscosity provides insights into the flow behavior of fluids, distinguishing between viscous or thick fluids (high viscosity) and less viscous or thin fluids (low viscosity).
Poiseuille‘s Formula
Poiseuille‘s formula, also known as Hagen-Poiseuille equation, describes the flow of viscous fluids through a cylindrical pipe. It provides a mathematical expression for the flow rate (Q) in terms of various parameters. The formula is given as:
Q = (π * ΔP * r^4) / (8ηL)
Where:
Application of Poiseuille‘s Formula
Poiseuille‘s formula finds application in various fields, particularly in the study of fluid dynamics and understanding fluid flow in different systems. Some of the notable applications include:
1. Blood Flow in Capillaries and Blood Vessels:
Poiseuille‘s formula helps in studying the flow of blood through capillaries and blood vessels. It aids in determining factors that affect blood flow, such as changes in vessel radius, viscosity of blood, and pressure differentials.
2. Flow in Pipes and Tubes:
The formula is used to analyze fluid flow in pipes and tubes, including industrial pipelines, plumbing systems, and hydraulic systems. It helps in designing and optimizing pipe networks by considering factors such as pipe diameter, length, pressure differences, and fluid properties.
3. Study of Respiratory System:
Poiseuille‘s formula is utilized to investigate airflow in the respiratory system, including the lungs and airways. It provides insights into the resistance encountered by airflow due to the diameter and length of the air passages.
4. Fluid Flow in Microchannels and Nanofluidics:
With the advancement of microfluidics and nanofluidics, Poiseuille‘s formula plays a crucial role in understanding fluid behavior at small scales. It assists in designing and analyzing devices such as lab-on-a-chip systems, microfluidic channels, and nanofluidic devices.
5. Flow through Filters and Porous Media:
Poiseuille‘s formula helps in studying fluid flow through filters, membranes, and porous media. It aids in determining the flow rates and pressure gradients across these systems, which is vital for applications like water filtration, oil extraction, and groundwater remediation.
These are just a few examples of the broad range of applications where Poiseuille‘s formula is utilized to understand and analyze fluid flow phenomena in various systems.
Stokes‘s Law
Stokes‘s law describes the drag force experienced by small spherical particles moving through a viscous fluid. It provides a mathematical expression for the drag force (F) acting on a spherical particle as it moves through the fluid at a low velocity. The formula is given as:
F = 6πηrv
Where:
Application of Stokes‘s Law
Stokes‘s law finds application in various fields, particularly in the study of fluid dynamics and particle motion in fluids. Some of the notable applications include:
1. Sedimentation and Particle Settling:
Stokes‘s law is used to understand the settling behavior of particles in a fluid. It helps in analyzing sedimentation processes, such as the settling of suspended particles in water, the separation of particles based on their size, and the determination of particle concentration in suspensions.
2. Measurement of Viscosity:
The law is utilized in viscometry to measure the viscosity of fluids. By measuring the terminal velocity of a small spherical particle falling through the fluid, the viscosity of the fluid can be determined using Stokes‘s law and appropriate calculations.
3. Particle Motion in Fluids:
Stokes‘s law is applied to understand the motion of small particles in fluids, such as the behavior of aerosol particles, droplets in emulsions, and bubbles in liquids. It helps in predicting the terminal velocity, settling behavior, and drag forces acting on these particles.
4. Filtration and Separation Processes:
The law is used in the design and optimization of filtration systems, such as air filters and liquid filtration systems. By considering the particle size, fluid properties, and filtration medium, Stokes‘s law helps in determining the efficiency and performance of these systems.
5. Particle Dynamics in Biological Systems:
Stokes‘s law is applied in the study of particle motion and dynamics in biological systems, such as the movement of cells, microorganisms, and particles in biological fluids. It aids in understanding phenomena like cell sedimentation, the behavior of particles in blood flow, and the diffusion of substances in biological environments.
These are just a few examples of the wide range of applications where Stokes‘s law is utilized to understand the behavior of small particles in viscous fluids and to analyze various processes involving particle motion and fluid dynamics.
Equation of Continuity
The equation of continuity is a fundamental principle in fluid dynamics that states that the mass flow rate of an incompressible fluid remains constant along a streamline. It expresses the relationship between the fluid‘s velocity, cross-sectional area, and density. The equation of continuity is given as:
A1v1= A2v2
Where:
Application of the Equation of Continuity
The equation of continuity finds numerous applications in the field of fluid dynamics and plays a crucial role in understanding and analyzing fluid flow phenomena. Here are some practical applications of the equation of continuity:
1. Fluid Flow in Pipes and Channels:
The equation of continuity is used to study the flow of fluids in pipes, channels, and ducts. It helps in determining the relationship between the velocity and cross-sectional area of the fluid at different points along the flow path. This is essential in designing efficient piping systems and optimizing flow rates.
2. Venturi Effect:
The Venturi effect is based on the principle of the equation of continuity. It describes the reduction in fluid pressure that occurs when the fluid flows through a constricted section of a pipe or a Venturi tube. The equation of continuity is used to analyze the change in fluid velocity and pressure in such systems.
3. Aerodynamics:
In aerodynamics, the equation of continuity is employed to study the flow of air around objects like wings, airfoils, and aircraft. It helps in determining the relationship between the air velocity and cross-sectional area, enabling the calculation of lift and drag forces experienced by the objects.
4. Hydraulics:
In hydraulic systems, the equation of continuity is used to analyze the flow of fluids in pipes, valves, and pumps. It aids in ensuring a consistent flow rate and pressure throughout the system, allowing for the efficient operation of hydraulic machinery.
5. Blood Flow in Circulatory System:
The equation of continuity is applied to study the flow of blood in blood vessels and arteries. It helps in understanding the relationship between the blood velocity and the cross-sectional area of blood vessels, which is crucial in assessing blood flow rates and diagnosing circulatory system disorders.
These are just a few examples of the diverse applications of the equation of continuity in different fields. The principle behind this equation is fundamental to fluid dynamics and provides valuable insights into the behavior of fluids in various contexts.
Bernoulli‘s Equation
Bernoulli‘s equation is a fundamental principle in fluid dynamics that relates the pressure, velocity, and elevation of a fluid in steady, incompressible flow. It is based on the conservation of energy principle and is expressed mathematically as:
P + ½ρv² + ρgh = constant
Where:
Applications of Bernoulli‘s Equation
Bernoulli‘s equation has various practical applications in fluid dynamics and is used to understand and analyze fluid flow phenomena. Here are some important applications of Bernoulli‘s equation:
1. Aerodynamics:
Bernoulli‘s equation is extensively used in aerodynamics to explain the lift generated by wings and airfoils. It helps in understanding how the pressure difference between the upper and lower surfaces of a wing contributes to the generation of lift, allowing aircraft to fly.
2. Pipe Flow:
In fluid mechanics, Bernoulli‘s equation is applied to study the flow of fluids in pipes. It helps in analyzing the pressure variations, velocity changes, and energy losses that occur in pipe systems, such as water supply pipes, oil pipelines, and irrigation systems.
3. Venturi Effect:
The Venturi effect is a direct consequence of Bernoulli‘s equation. It describes the decrease in fluid pressure that occurs when the fluid flows through a constriction in a pipe or a Venturi tube. This effect is utilized in various applications, including carburetors, atomizers, and air flow measurement devices.
4. Blood Flow in Blood Vessels:
Bernoulli‘s equation is used to understand blood flow in blood vessels and to assess conditions such as stenosis or blockages. It helps in evaluating the pressure changes and velocity variations in the circulatory system, aiding in the diagnosis and treatment of cardiovascular diseases.
5. Hydraulic Systems:
Bernoulli‘s equation is employed in hydraulic systems, such as water turbines, pumps, and hydraulic lifts. It enables engineers to calculate the pressure, velocity, and flow rates within the system, ensuring efficient energy transfer and performance.
These are just a few examples of the numerous applications of Bernoulli‘s equation in various fields. The equation provides valuable insights into fluid behavior and has practical implications in designing and analyzing fluid flow systems.
Thermodynamic Systems
In thermodynamics, a system refers to a specific region or portion of space that is under study or analysis. It can be a physical object, substance, or a defined volume. The behavior and properties of a system are studied by observing the exchange of energy, matter, and other variables between the system and its surroundings. Here are the three main types of thermodynamic systems:
1. Open System:
An open system allows the transfer of both energy and matter across its boundaries with the surroundings. This means that substances can enter or leave the system, and energy can be exchanged in the form of heat or work. Examples of open systems include a pot of boiling water with vapor escaping, or a living organism exchanging heat and nutrients with its environment.
2. Closed System:
A closed system permits the transfer of energy across its boundaries but does not allow the exchange of matter. The system is isolated from its surroundings in terms of mass, but energy can still enter or leave in the form of heat or work. A sealed container with a fixed amount of gas undergoing temperature changes is an example of a closed system.
3. Isolated System:
An isolated system is completely sealed and does not interact with its surroundings in terms of energy or matter exchange. It is self-contained and isolated from any external influences. The total energy and mass within an isolated system remain constant. The universe is often considered as an isolated system since it is regarded as a closed and self-contained entity.
Thermodynamic systems serve as a basis for studying and analyzing various thermodynamic processes, including heat transfer, work interactions, and changes in energy and entropy. The choice of system type depends on the specific application and the nature of the phenomena being investigated.
Work Done during Volume Change (Formula Derivation)
In thermodynamics, work is a form of energy transfer that occurs during a change in the volume of a system. The work done during a volume change can be derived using the following steps:
Step 1: Consider a System
Start by considering a thermodynamic system, such as a gas enclosed in a cylinder with a movable piston. Assume that the gas undergoes a volume change from an initial volume V1to a final volume V2.
Step 2: Define Pressure
Let P be the pressure exerted by the gas on the movable piston. Since pressure is defined as the force per unit area, the force F exerted by the gas on the piston can be expressed as F = P * A, where A is the cross-sectional area of the piston.
Step 3: Calculate Differential Work
Now, consider an infinitesimal change in volume dV. As the gas expands or contracts, the piston moves, causing a displacement dx. The differential work done dW can be calculated as:
dW = F * dx
Substituting the expression for force F, we have:
dW = (P * A) * dx
Step 4: Express dx in terms of dV
Since dx represents the displacement of the piston, it can be expressed in terms of the change in volume dV. The cross-sectional area A multiplied by the change in displacement dx gives the change in volume dV:
dV = A * dx
From this equation, we can express dx as:
dx = dV / A
Step 5: Substitute dx in the Work Equation
Substituting the expression for dx in the differential work equation, we have:
dW = (P * A) * (dV / A)
dW = P * dV
Step 6: Integrate for Total Work
To find the total work done during the volume change from V1to V2, integrate the differential work equation:
W = ∫ (P * dV)
W = ∫P dV
Step 7: Apply Appropriate Equation of State
Depending on the gas and its behavior, an appropriate equation of state (such as the ideal gas law or a more specialized equation) can be used to express the pressure P in terms of the volume V. This allows the integration to be carried out.
The resulting expression for the work done during the volume change depends on the specific conditions and equation of state applied.
This derivation provides a general framework for calculating the work done during a volume change in a thermodynamic system. The actual expression for work may vary depending on the specific system and the equation of state used to relate pressure and volume.
Heat:
Work:
Difference between Heat and Work:
First Law of Thermodynamics:
The first law of thermodynamics states that the change in internal energy (ΔU) of a system is equal to the heat transfer (Q) into the system minus the work done (W) by the system:
ΔU = Q - W
This equation represents the conservation of energy principle in thermodynamics and relates the changes in internal energy, heat, and work for a given system.
Internal Energy
Internal energy refers to the total energy possessed by a thermodynamic system. It includes the kinetic energy and potential energy of the molecules or particles within the system. Here are some key points about internal energy:
Definition:
Forms of Internal Energy:
Change in Internal Energy:
Relationship with Temperature:
Internal energy is a fundamental concept in thermodynamics, and understanding its behavior is crucial for analyzing and predicting the behavior of thermodynamic systems.
First Law of Thermodynamics
The first law of thermodynamics, also known as the law of energy conservation, states that energy cannot be created or destroyed in an isolated system. It can only be transferred or converted from one form to another. Here are some key points about the first law of thermodynamics:
Energy Conservation:
Internal Energy:
Heat and Work:
Conservation Principle:
The first law of thermodynamics provides a fundamental framework for understanding and analyzing energy transformations and exchanges in various thermodynamic processes.
Isothermal Process
An isothermal process is a thermodynamic process in which the temperature of a system remains constant throughout the process. Here are some key points about isothermal processes:
Characteristics:
Work Done:
Isochoric Process (Constant Volume)
An isochoric process is a thermodynamic process in which the volume of a system remains constant. Here are some key points about isochoric processes:
Characteristics:
Work Done:
Isobaric Process (Constant Pressure)
An isobaric process is a thermodynamic process in which the pressure of a system remains constant. Here are some key points about isobaric processes:
Characteristics:
Work Done:
Adiabatic Process (No Heat Transfer)
An adiabatic process is a thermodynamic process in which there is no heat exchange between the system and its surroundings. Here are some key points about adiabatic processes:
Characteristics:
Work Done:
These different thermodynamic processes have specific characteristics and relationships between work done, heat transfer, and changes in thermodynamic properties, providing insights into the behavior of systems under different conditions.
Heat Capacities of an Ideal Gas
The heat capacities of an ideal gas represent the amount of heat energy required to change the temperature of the gas at constant pressure (Cp) or constant volume (Cv). Here are the definitions and relationships between these heat capacities:
Specific Heat Capacity at Constant Pressure (Cp)
The specific heat capacity at constant pressure, Cp, is defined as the amount of heat energy required to raise the temperature of a unit mass of the gas by one degree Celsius (or one Kelvin) while keeping the pressure constant.
Specific Heat Capacity at Constant Volume (Cv)
The specific heat capacity at constant volume, Cv, is defined as the amount of heat energy required to raise the temperature of a unit mass of the gas by one degree Celsius (or one Kelvin) while keeping the volume constant.
Relation between Cp and Cv
For an ideal gas, the relationship between the specific heat capacities at constant pressure and constant volume is given by:
Cp - Cv = R
where R is the specific gas constant.
This relationship is a consequence of the First Law of Thermodynamics and is applicable to ideal gases under various conditions.
Mayer‘s Formula Derivation
Mayer‘s formula relates the specific heat capacity at constant pressure (Cp) to the specific heat capacity at constant volume (Cv) for an ideal gas. The derivation of Mayer‘s formula is as follows:
Let‘s consider a gas undergoing a process from state A to state B, with an increase in temperature (ΔT) at constant pressure (P).
The change in internal energy (ΔU) of the gas can be expressed as:
ΔU = Q - W
where Q is the heat added to the gas and W is the work done by the gas.
For a process at constant pressure, the work done by the gas can be written as:
W = PΔV
where ΔV is the change in volume of the gas.
Using the ideal gas equation, PV = nRT, where n is the number of moles of the gas and R is the specific gas constant, we can rewrite the work expression as:
W = nRTΔV / V
Since the process is at constant pressure, we can also write:
Q = CpΔT
where Cp is the specific heat capacity at constant pressure.
Substituting the expressions for Q and W into the equation ΔU = Q - W, we have:
ΔU = CpΔT - nRTΔV / V
Since ΔU = CvΔT, where Cv is the specific heat capacity at constant volume, we can rewrite the equation as:
CvΔT = CpΔT - nRTΔV / V
Dividing both sides of the equation by nΔT, we get:
Cv = Cp - RΔV / V
Finally, using the ideal gas equation PV = nRT, we can express the change in volume as ΔV = V - Vo, where Vo is the initial volume of the gas. Substituting this expression into the equation, we obtain:
Cv = Cp - R (V - Vo) / V
Simplifying further, we have:
Cv = Cp - R + RVo / V
Mayer‘s formula is derived as:
Cp - Cv = R
This derivation shows the relationship between the specific heat capacities at constant pressure and constant volume for an ideal gas, which is known as Mayer‘s formula.
Isothermal Process for an Ideal Gas
In an isothermal process, the temperature of an ideal gas remains constant throughout the process. This means that the gas is in thermal equilibrium with its surroundings, and any heat added or removed from the gas is balanced by an equal amount of work done by or on the gas.
During an isothermal expansion or compression of an ideal gas, the gas follows the ideal gas law:
PV = nRT
where P is the pressure, V is the volume, n is the number of moles of the gas, R is the specific gas constant, and T is the temperature.
For an isothermal process, the equation can be rewritten as:
P1V1 = P2V2
where P1 and V1 are the initial pressure and volume, and P2 and V2 are the final pressure and volume.
The work done (W) during an isothermal process can be calculated using the equation:
W = nRTln (V2/V1)
This equation indicates that work is done by or on the gas due to the change in volume, and the magnitude of the work depends on the logarithmic ratio of the initial and final volumes.
Adiabatic Process for an Ideal Gas
In an adiabatic process, no heat is exchanged between the gas and its surroundings. This means that the change in internal energy of the gas is solely due to work done on or by the gas.
For an adiabatic process, the ideal gas law can be expressed as:
PV^γ = constant
where γ is the ratio of specific heats (Cp/Cv) for the gas.
During an adiabatic expansion or compression of an ideal gas, the equation can be rewritten as:
P1V1^γ = P2V2^γ
where P1 and V1 are the initial pressure and volume, and P2 and V2 are the final pressure and volume.
The work done (W) during an adiabatic process can be calculated using the equation:
W = (P1V1 - P2V2) / (γ - 1)
This equation shows that work is done by or on the gas due to the change in pressure and volume, and the magnitude of the work depends on the difference between the initial and final pressures and volumes, as well as the specific heat ratio γ.
An adiabatic process is characterized by a steeper pressure-volume curve compared to an isothermal process, indicating a more rapid change in pressure and volume.
Thermodynamic Systems:
In thermodynamics, there are three types of thermodynamic systems:
Direction of Thermodynamic Processes:
Thermodynamic processes can be classified based on the direction of energy transfer and can be categorized into four types:
The direction of thermodynamic processes is determined by the laws of thermodynamics and the properties of the system and its surroundings. The second law of thermodynamics, specifically the concept of entropy, provides a criterion for the direction of spontaneous processes. Spontaneous processes tend to move towards increasing entropy or disorder in the universe.
Note that the direction of a process may vary depending on the specific conditions and constraints of the system.
Second Law of Thermodynamics
The second law of thermodynamics is a fundamental principle that describes the behavior of energy and heat in physical systems. It can be understood from different perspectives, as explained below:
Clausius Statement:
The Clausius statement, proposed by Rudolf Clausius, states that heat cannot spontaneously flow from a colder body to a hotter body. It establishes the direction of heat transfer, which occurs naturally only from a higher temperature region to a lower temperature region.
Kelvin-Planck Statement:
The Kelvin-Planck statement, named after Lord Kelvin and Sadi Carnot, asserts that it is impossible to construct a device that operates in a cycle and extracts heat from a single reservoir to produce an equivalent amount of work without any other effect. This statement highlights the impossibility of creating a perpetual motion machine of the second kind.
Entropy Increase:
From an entropy perspective, the second law of thermodynamics states that the entropy of an isolated system tends to increase over time. Entropy is a measure of the disorder or randomness within a system. This principle indicates that natural processes tend to move towards states of greater entropy.
Statistical Mechanics:
In the framework of statistical mechanics, the second law of thermodynamics is derived from the behavior of large ensembles of particles. It states that in a closed system, the probability of finding the system in a more probable macrostate (higher entropy) is much larger than finding it in a less probable macrostate (lower entropy).
These different perspectives provide complementary insights into the second law of thermodynamics. They collectively emphasize that natural processes have a preferred direction, with heat flowing from higher to lower temperature regions and systems tending towards states of greater entropy. The second law has profound implications in understanding energy transformations, the limitations of heat engines, and the behavior of physical systems in diverse scientific and engineering applications.
Heat Engine
A heat engine is a device that converts thermal energy into mechanical work, utilizing the principles of thermodynamics. It operates in a cyclic manner, extracting heat from a high-temperature source, converting a portion of it into useful work, and rejecting the remaining heat to a low-temperature sink. Heat engines play a crucial role in various applications, including power generation, transportation, and industrial processes.
Basic Components:
A typical heat engine consists of the following components:
Efficiency:
The efficiency of a heat engine is defined as the ratio of useful work output to the heat input. It is given by the equation:
Efficiency = (Work Output) / (Heat Input)
Carnot Efficiency:
The Carnot efficiency represents the maximum possible efficiency that a heat engine can achieve when operating between two temperature reservoirs. It is given by the equation:
Carnot Efficiency = 1 - (Temperature of Low-Temperature Reservoir / Temperature of High-Temperature Reservoir)
Applications:
Heat engines are widely used in various applications, including:
These applications rely on the conversion of heat energy into mechanical work to power vehicles, generate electricity, or provide cooling. Heat engines have significantly contributed to the advancement of modern industrial and technological systems.
Internal Combustion Engines: Otto Cycle, Diesel Cycle, Carnot Cycle
Otto Cycle:
The Otto cycle is a theoretical thermodynamic cycle that describes the operation of a spark-ignition internal combustion engine, commonly known as a gasoline engine. It consists of four processes: intake, compression, combustion, and exhaust.
The Otto cycle is commonly used in gasoline-powered cars and small engines. It is characterized by a constant-volume heat addition process (combustion) and a constant-volume heat rejection process (exhaust).
Diesel Cycle:
The Diesel cycle is a theoretical thermodynamic cycle that represents the operation of a diesel engine. It is similar to the Otto cycle but differs in the combustion process. The Diesel cycle consists of four processes: intake, compression, combustion, and exhaust.
The Diesel cycle is commonly used in diesel engines, which are known for their efficiency and power. It is characterized by a constant-pressure heat addition process (combustion) and a constant-volume heat rejection process (exhaust).
Carnot Cycle:
The Carnot cycle is an idealized thermodynamic cycle that represents the maximum possible efficiency for a heat engine operating between two temperature reservoirs. It serves as a theoretical benchmark for the performance of heat engines.
The Carnot cycle is a reversible cycle and operates with maximum efficiency. However, achieving the Carnot efficiency in real engines is not possible due to various losses and limitations.
These cycles play a significant role in the operation and design of internal combustion engines, providing insights into their thermodynamic performance and efficiency.
Refrigerator
A refrigerator is a device that uses the principles of thermodynamics to remove heat from a low-temperature space and transfer it to a high-temperature space, resulting in the cooling of the low-temperature space. It operates on the refrigeration cycle, which involves the following components:
This refrigeration cycle is repeated continuously to maintain the desired low temperature inside the refrigerator. The refrigerator requires an external power source, typically electricity, to drive the compressor and facilitate the refrigeration process.
By effectively removing heat from the low-temperature space, refrigerators are able to keep the contents cool and prevent spoilage. They are commonly used in households, commercial establishments, and various industries to preserve perishable items and provide cooling functionality.
Entropy and Disorder
Entropy is a fundamental concept in thermodynamics that is closely related to the idea of disorder in a system. It quantifies the degree of randomness or chaos within a system at the microscopic level. Here are some key points about entropy and its relationship with disorder:
Molecular Level:
Macroscopic Level:
Examples:
Relationship with Disorder:
Entropy and its relationship with disorder play a crucial role in understanding the behavior of physical systems, energy transfer, and the direction of natural processes.
Progressive Wave
A progressive wave is a type of wave that carries energy from one place to another through the periodic disturbance of a medium. It exhibits a characteristic pattern of oscillation and motion as it propagates. Here are some key points about progressive waves:
Characteristics:
Propagation:
Examples:
Progressive waves are fundamental to our understanding of various natural phenomena, including sound, light, water waves, and seismic waves. They play a crucial role in communication, transportation, and the study of wave behavior in different mediums.
Certainly! Here is the mathematical description of a wave in the requested format:Mathematical Description of a Wave:
The general equation for a wave is given by:
y (x, t) = A sin (kx - ωt + φ)
In this equation:
This equation describes a sinusoidal wave propagating in the positive x-direction. The term (kx - ωt) represents the phase of the wave, which changes as the wave propagates in space and time. The phase constant φ determines the initial phase of the wave at t = 0.
By varying the amplitude A, wave number k, angular frequency ω, and phase constant φ, we can describe different types of waves with varying properties such as wavelength, frequency, and phase.
This mathematical description provides a framework for understanding the behavior and characteristics of waves in various contexts, including sound waves, light waves, and other wave phenomena.
Stationary Wave
A stationary wave, also known as a standing wave, is a wave pattern that appears to be standing still rather than propagating through space. It is formed by the interference of two waves of the same frequency and amplitude traveling in opposite directions. Unlike a progressive wave, which moves through space, a stationary wave oscillates in place.
Mathematical Description:
The mathematical equation for a stationary wave is given by:
y (x,t)=-2Asin (kx)Cos (wt)
| Time (t) | y1 = A sin (ωt - kx) | y2 = -A sin (ωt + kx) | y_net = y1 + y2 |
|---|---|---|---|
| t/4 | A sin (π/2 - kx) | -A sin (π/2 + kx) | 0 |
| t/2 | A sin (π - kx) | -A sin (π + kx) | -2A sin (kx) |
| 2t/3 | A sin (4π/3 - kx) | -A sin (4π/3 + kx) | 0 |
| t | A sin (2π - kx) | -A sin (2π + kx) | 0 |
In this equation:
In a stationary wave, certain points called nodes and antinodes remain fixed. Nodes are points where the displacement is always zero, while antinodes are points of maximum displacement. The distance between two consecutive nodes or antinodes is half the wavelength of the wave.
Stationary waves have distinct modes or patterns of vibration, characterized by the number of nodes and antinodes present. These modes are determined by the boundary conditions of the system in which the wave is formed, such as the length of the medium or the presence of fixed boundaries.
Stationary waves have various applications, including musical instruments, acoustic resonance, and electromagnetic waveguides. Understanding their properties and behavior is crucial in fields such as physics and engineering.
Mechanical Waves
Mechanical waves are waves that require a medium, such as a solid, liquid, or gas, for their propagation. They transfer energy through the vibration of particles in the medium. Here are some key characteristics of mechanical waves:
Types of Mechanical Waves:
Wave Parameters:
Wave Equation:
The general equation for a mechanical wave can be represented as:
y (x, t) = A sin (kx - ωt + φ)
where:
Propagation of Mechanical Waves:
Mechanical waves propagate through the medium by transferring energy from one particle to another. The particles oscillate around their equilibrium positions, causing a wave pattern to travel through the medium.
Mechanical waves are essential in various natural phenomena and have practical applications in fields such as acoustics, seismology, and telecommunications.
Speed of Wave Motion
The speed of wave motion, also known as the wave speed or propagation speed, refers to the rate at which a wave travels through a medium. It is determined by the properties of the medium through which the wave is propagating.
For mechanical waves, such as sound waves and waves on a string, the wave speed can be calculated using the equation:
v = λf
where:
This equation shows that the wave speed is directly proportional to the wavelength and the frequency of the wave. If the wavelength increases while the frequency remains constant, the wave speed will also increase. Similarly, if the frequency increases while the wavelength remains constant, the wave speed will increase as well.
It is important to note that the wave speed is specific to the medium through which the wave is traveling. Different materials have different properties that affect the speed of wave propagation. For example, sound waves travel at different speeds in air, water, and solids due to differences in their densities and compressibility.
The wave speed plays a crucial role in understanding the behavior and characteristics of waves, including their interference, diffraction, and reflection. It also determines how quickly information or energy can be transmitted through a medium via wave motion.
Derivation of Velocity of Sound in a Gas using Dimensional Analysis
To derive the velocity of sound in a gas using dimensional analysis, we consider the relevant physical quantities and their dimensions:
Using dimensional analysis, we express the velocity of sound as a function of these quantities:
v = f (P, ρ, B)
To determine the functional form, we analyze the dimensions of each quantity:
By comparing the dimensions, we write:
v = k * (P^a) * (ρ^b) * (B^c)
where k, a, b, and c are constants to be determined.
To determine the exponents (a, b, and c), we equate the dimensions on both sides of the equation:
[L/T] = (M/ (LT^2))^a * (M/L^3)^b * (M/ (LT^2))^c
Simplifying the equation, we get:
[L/T] = M^ (a + b + c) * L^ (-2a - 3b) * T^ (-2a - 2c)
Equating the dimensions, we obtain:
a + b + c = 0 (for the mass dimension)
-2a - 3b = 1 (for the length dimension)
-2a - 2c = -1 (for the time dimension)
Solving these equations, we find:
a = -1/2
b = -1/2
c = 1/2
Substituting these values back into the equation, we have:
v = k * (P^ (-1/2)) * (ρ^ (-1/2)) * (B^ (1/2))
Simplifying further, we get:
v = k * √ (B/ρ)
where k is a constant.
Therefore, the velocity of sound in a gas can be expressed as v = k * √ (B/ρ) using dimensional analysis. The constant k will depend on the specific units used for pressure, density, and bulk modulus.
Newton‘s Formula for Velocity of Sound
Derivation:
Assume that the gas is undergoing an isothermal process.
This means that the temperature of the gas remains constant as the sound wave propagates through it.
The pressure of the gas is inversely proportional to its volume.
So, we can write the following equation:
P = k / Vwhere k is a constant.
The velocity of sound is the distance that a sound wave travels in a unit time.
It can be calculated as follows:
v = d / twhere d is the distance traveled by the sound wave and t is the time taken to travel that distance.
The distance traveled by the sound wave is equal to the volume of the gas that is compressed and rarefied during the propagation of the sound wave.
The time taken to travel that distance is equal to the time taken for the pressure of the gas to change from P to P + dP.
Therefore, we can write the following equation for the velocity of sound:
v = V / (P + dP) / PExpanding the denominator, we get:
v = V / (P / V + dP / V)Assuming that dP is very small, we can write the following equation:
v = V / (P + dP) ≈ V / PSubstituting the equation P = k / V into the above equation, we get:
v = √ (P / ρ)where ρ is the density of the gas.
This is the derivation of Newton‘s formula for the velocity of sound in a gas.
It relates the velocity of sound (v) to the pressure (P) and density (ρ) of the gas, and demonstrates the inverse relationship between pressure and volume in an isothermal process.
Look book for Laplace Correction
Effect of Temperature, Pressure, and Humidity on Velocity of Sound:
Temperature:
Pressure:
Humidity:
In summary, the velocity of sound in a gas is influenced by temperature, pressure, and humidity. Higher temperatures and pressures increase the velocity of sound, while increased humidity decreases it. These factors should be taken into account when considering the speed of sound in different environments.
Stationary Waves in Closed and Open Pipes
Stationary waves can be formed in closed and open pipes when a wave reflects back and forth between the ends of the pipe, creating a pattern of nodes and antinodes. The characteristics of these stationary waves depend on the type of pipe.
Closed Pipe:
In a closed pipe, one end is closed, and the other end is open. The closed end acts as a node, and the open end acts as an antinode. The fundamental frequency (first harmonic) in a closed pipe produces a wavelength that is twice the length of the pipe. The subsequent harmonics have wavelengths that are integer multiples of the fundamental wavelength.
Open Pipe:
In an open pipe, both ends are open. Both ends act as antinodes. The fundamental frequency (first harmonic) in an open pipe produces a wavelength that is four times the length of the pipe. The subsequent harmonics have wavelengths that are odd integer multiples of the fundamental wavelength.
The velocity of sound in the pipe can be determined using the formula:
v = f * λ
where v is the velocity of sound, f is the frequency of the wave, and λ is the wavelength of the wave.
The frequency and wavelength of the stationary waves in the pipe are related by the following equations:
Closed Pipe:
fn= (2n - 1) * (v / 4L)
λn= (4L) / (2n - 1)
Open Pipe:
fn= n * (v / 2L)
λn= (2L) / n
where n is the harmonic number and L is the length of the pipe.
The velocity of sound in the pipe can also be affected by various factors such as temperature, pressure, and humidity:
Temperature:
As the temperature increases, the velocity of sound in the pipe also increases. This is because the molecules in the air move faster at higher temperatures, leading to a higher speed of sound.
Pressure:
Changes in pressure have a negligible effect on the velocity of sound in the pipe, as long as the pressure changes are not too significant.
Humidity:
Humidity, or the moisture content in the air, can affect the velocity of sound. Moist air is less dense than dry air, resulting in a slightly lower velocity of sound.
Understanding the behavior of stationary waves in closed and open pipes and the factors influencing the velocity of sound is important in various fields, including acoustics, music, and engineering.
Harmonics and Overtones in Closed and Open Pipes
Harmonics and overtones are terms used to describe the different frequencies or pitches produced in a vibrating system, such as a closed or open pipe. They play a significant role in the formation of musical tones and the sound characteristics of musical instruments.
Harmonics in Closed Pipes:
In a closed pipe, such as a flute or a stopped organ pipe, the air column is closed at one end and open at the other. The fundamental frequency, also known as the first harmonic, is the lowest frequency produced when the pipe vibrates. The fundamental frequency is determined by the length of the pipe, with shorter pipes producing higher fundamental frequencies.
Higher harmonics in a closed pipe are produced as integer multiples of the fundamental frequency. The second harmonic is twice the frequency of the fundamental, the third harmonic is three times the frequency, and so on. These harmonics create a series of distinct frequencies that contribute to the overall sound produced by the instrument.
Overtones in Open Pipes:
In an open pipe, such as a clarinet or an open organ pipe, both ends of the pipe are open. Similar to closed pipes, the fundamental frequency in an open pipe corresponds to the first harmonic. However, open pipes also produce a series of additional frequencies called overtones.
Overtones in an open pipe are produced as odd-numbered multiples of the fundamental frequency. The second overtone is three times the frequency of the fundamental, the third overtone is five times the frequency, and so on. These overtones contribute to the complex and rich sound produced by the instrument.
Relation between Harmonics and Overtones:
While harmonics and overtones are terms used in different contexts (closed pipes vs. open pipes), they are essentially related. In both cases, harmonics and overtones refer to the frequencies produced that are multiples of the fundamental frequency. The distinction lies in the specific conditions of the vibrating system (closed or open) and the resulting pattern of frequencies generated.
Understanding the concept of harmonics and overtones is essential in the study of acoustics and the analysis of musical sounds. It allows us to analyze and appreciate the complex and diverse range of tones produced by various musical instruments.
End Correction in Pipes
End correction is a phenomenon that occurs in open pipes, such as flute tubes or organ pipes, due to the presence of the pipe‘s open end. It refers to the adjustment needed to account for the difference in effective length between the physical length of the pipe and the length required for accurate sound wave calculations.
When a sound wave is produced in an open pipe, it travels back and forth along the pipe‘s length. At the open end, the sound wave experiences a sudden change in pressure and undergoes partial reflection. This reflection causes an effective extension of the pipe beyond its physical length.
To compensate for this end correction, an additional length, called the end correction length, is added to the physical length of the pipe when calculating the wavelength and frequency of the sound wave. The end correction length depends on the diameter and geometry of the pipe and is typically a fraction of the pipe‘s radius.
Mathematically, the effective length of the pipe (Leff) can be calculated using the following equation:
Leff= L + δ
where:
The end correction length varies depending on the specific design and shape of the pipe. It is typically determined experimentally by comparing the actual pitch produced by the pipe with the predicted pitch based on theoretical calculations without considering the end correction.
Accounting for end correction is important for accurate calculation of the fundamental frequency and harmonics produced by open pipes. It ensures that the calculated values align with the observed pitch and sound characteristics of the instrument, improving the overall precision and quality of the sound produced.
Velocity of Transverse Waves along a Stretched String
The velocity of transverse waves traveling along a stretched string is determined by the properties of the string and the tension applied to it. It can be calculated using the following equation:
v = √ (T/μ)
where:
The linear mass density (μ) of the string is defined as the mass per unit length of the string and is calculated as:
μ = m / L
where:
The velocity of transverse waves on a stretched string depends on the tension applied to the string and the mass per unit length. Increasing the tension in the string or decreasing the linear mass density will result in a higher wave velocity. This means that waves will propagate more quickly along a taut string with low mass per unit length.
It is important to note that the above equation assumes ideal conditions, such as a perfectly flexible and homogeneous string. In real-world scenarios, factors such as string stiffness, damping, and non-uniformity can affect the actual wave velocity. However, the equation provides a good approximation for idealized situations and serves as a useful starting point for understanding the behavior of transverse waves on a stretched string.
Vibration of a String and Overtones
When a string is set into vibration, it produces a fundamental frequency, which is the lowest frequency at which the string can vibrate. This fundamental frequency corresponds to the first harmonic of the string. However, a vibrating string can also produce higher frequencies known as overtones or harmonics.
The fundamental frequency (f1) of a vibrating string can be determined by the following equation:
f1= (1/2L) √ (T/μ)
where:
Overtones, or higher harmonics, are frequencies that are integer multiples of the fundamental frequency. The nth overtone (fn) can be calculated using the equation:
fn= nf1
where:
Each overtone corresponds to a specific mode of vibration of the string. The first overtone (second harmonic) has twice the frequency of the fundamental, the second overtone (third harmonic) has three times the frequency, and so on.
The presence of overtones in the vibration of a string gives rise to the rich and complex sound produced by musical instruments such as guitars, violins, and pianos. The unique combination and interaction of different overtones create the characteristic timbre and quality of the instrument‘s sound.
Laws of Vibration of a Fixed String
When a string is fixed at both ends and set into vibration, it follows certain fundamental laws that govern its behavior. These laws describe the characteristics of the vibrations and the relationship between various parameters.
1.Law of Length:The frequency of vibration of a fixed string is inversely proportional to its length. A shorter string produces a higher frequency, while a longer string produces a lower frequency. Mathematically, it can be expressed as:
f ∝ 1/L
where:
2.Law of Tension:The frequency of vibration of a fixed string is directly proportional to the square root of its tension. Increasing the tension in the string increases the frequency of vibration. Mathematically, it can be expressed as:
f ∝ √T
where:
3.Law of Linear Mass Density:The frequency of vibration of a fixed string is inversely proportional to the square root of its linear mass density. A string with lower mass per unit length will vibrate at a higher frequency. Mathematically, it can be expressed as:
f ∝ 1/√μ
where:
These laws of vibration help us understand and predict the behavior of fixed strings in musical instruments, such as guitars, violins, and pianos. By adjusting the length, tension, and linear mass density of the strings, musicians can produce different pitches and tones to create beautiful music.
The laws of vibration of a fixed string are fundamental principles that govern the behavior of vibrating strings. They are essential in understanding the physics of musical instruments such as guitars, violins, and pianos.
These laws can be summarized as follows:
By manipulating the length, tension, and linear mass density of the strings, musicians can produce different pitches and tones to create music.
Sound waves: Pressure Amplitude (with derivation)
The pressure amplitude of a sound wave, denoted by Δpmax, is the maximum change in pressure from the equilibrium pressure of the medium. It can be related to the displacement amplitude, a, using the equation:
Δpmax = Bak
Where:
The bulk modulus, B, is a measure of how much a material resists changes in pressure and is related to the speed of sound in the medium, v, by the equation:
v = √ (B/ρ)
Where:
The derivation of the equation for pressure amplitude is as follows:
Therefore, the pressure amplitude of a sound wave can be determined using the equation Δpmax = Bak, where B is the bulk modulus of the medium, a is the displacement amplitude, and k is the wavenumber.
Characteristics of Sound: Intensity, Loudness, Quality, and Pitch
Intensity:
Intensity refers to the amount of energy carried by a sound wave per unit area. It is a measure of the power of the sound wave and is represented by the symbol I. The intensity of sound is directly proportional to the square of the amplitude of the wave. Mathematically, it can be expressed as:
I = (P/A)
Where:
Loudness:
Loudness is the subjective perception of the intensity of sound. It is influenced by the sensitivity of the human ear to different frequencies of sound waves. The loudness of sound is measured in units called decibels (dB). The relationship between loudness and intensity is not linear but follows a logarithmic scale. This is because the human ear has a logarithmic response to sound intensity. Therefore, a doubling of the intensity of a sound wave does not result in a doubling of the perceived loudness.
Quality (Timbre):
Quality, also known as timbre, refers to the characteristic tone or color of a sound. It distinguishes one sound from another, even if they have the same intensity and pitch. Quality is influenced by the presence of overtones or harmonics in a sound wave. These overtones give each sound its unique timbre. For example, a musical instrument and a human voice playing the same note will have different qualities or timbres, allowing us to distinguish between them.
Pitch:
Pitch is the perceptual property of sound that allows us to classify sounds as high or low. It is determined by the frequency of the sound wave. A high-pitched sound has a high frequency, while a low-pitched sound has a low frequency. Pitch is measured in units called hertz (Hz), which represents the number of cycles or vibrations per second. The pitch of a sound is subjective and can vary between individuals based on their hearing capabilities.
These characteristics of sound, including intensity, loudness, quality, and pitch, play a significant role in our perception and understanding of the auditory world around us.
Doppler‘s Effect
The Doppler effect refers to the change in frequency or wavelength of a wave perceived by an observer when there is relative motion between the source of the wave and the observer. It explains the phenomenon of why the pitch of a sound seems to change when a moving object passes by.
The Doppler effect can be described in different cases:
Case 1: Source moving towards the observer
In this case, the relative velocity between the source and the observer is positive. The frequency of the waves that the observer hears is given by the equation:
f‘ = f * (v + u) / v
where:
Case 2: Source moving away from the observer
In this case, the relative velocity between the source and the observer is negative. The frequency of the waves that the observer hears is given by the equation:
f‘ = f * (v - u) / v
Case 3: Observer moving towards the source
In this case, the relative velocity between the observer and the source is positive. The frequency of the waves that the observer hears is given by the equation:
f‘ = f * (v + vo) / v
where:
Case 4: Observer moving away from the source
In this case, the relative velocity between the observer and the source is negative. The frequency of the waves that the observer hears is given by the equation:
f‘ = f * (v - vo) / v
where:
The Doppler effect has applications in various fields, such as astronomy, meteorology, and acoustics, and it helps explain the perceived changes in frequency and pitch when there is relative motion between a source and an observer.
Huygen‘s Principle
Huygen‘s principle, formulated by Dutch physicist Christiaan Huygens in the 17th century, is a fundamental concept in wave theory. It states that every point on a wavefront can be considered as a source of secondary spherical wavelets that spread out in all directions. The envelope of these secondary wavelets at a later time represents the new position of the wavefront.
Key principles of Huygen‘s principle:
Huygen‘s principle provides a useful method for understanding the propagation of waves and explaining phenomena such as reflection, refraction, and diffraction. It helps to explain how waves interact with obstacles and how they bend around corners or edges.
By considering each point on a wavefront as a source of secondary wavelets, Huygen‘s principle provides a simple and intuitive way to analyze the behavior of waves and understand various wave phenomena.
Reflection and Refraction in Wave Theory
In wave theory, reflection and refraction are fundamental phenomena that occur when waves encounter boundaries or interfaces between different media. These phenomena can be explained using the principles of wave propagation and Huygens‘ principle.
Reflection
Reflection refers to the bouncing back of a wave when it encounters a boundary between two media. When a wavefront reaches a reflective surface, each point on the wavefront acts as a source of secondary wavelets according to Huygens‘ principle. These secondary wavelets propagate in all directions, and the reflected wavefront is formed by thecoherentcombination of these secondary wavelets. The angle of incidence(θi)is equal to the angle of reflection(θr), measured with respect to the normal to the reflecting surface. The incident wave and the reflected wave are on opposite sides of the normal.
Refraction
Refraction occurs when a wave passes from one medium to another and changes its direction due to the change in speed. According to wave theory, when a wavefront reaches the boundary between two media at an angle, each point on the wavefront acts as a source of secondary wavelets. These secondary wavelets propagate into the new medium with a different speed, causing the wavefront to change its direction. The angle of incidence(θi)is not necessarily equal to the angle of refraction(θr), and the incident wave and the refracted wave are on the same side of the normal. The change in direction is determined by Snell‘s law, which states that theratioof the sines of the angles of incidence and refraction is equal to the ratio of the wave speeds in the two media.
Reflection and refraction are important phenomena in understanding the behavior of waves when they encounter boundaries or interfaces. They play a crucial role in various practical applications, such as optics, acoustics, and electromagnetic waves. The wave theory provides a comprehensive framework to analyze and explain these phenomena based on the principles of wave propagation and Huygens‘ principle.
Acoherent sourceis a source of waves that emits waves that are all in phase with each other. This means that the peaks and troughs of the waves are all aligned, and the waves interfere constructively.
Coherent sources are important in many applications, such as lasers and interferometers. In a laser, the coherent light waves are emitted from a single atom or molecule, and they are amplified by passing through a gain medium. In an interferometer, two coherent light waves are superimposed, and the interference pattern is used to measure distances or to study the properties of light.
Refer to book for DerivationsIn physics, two waves are said to becoherentif they have the same frequency and a constant phase difference. Coherence implies that the peaks and troughs of the waves are aligned, allowing them to interfere constructively.
Interferenceis the phenomenon that occurs when two or more waves overlap. When coherent waves overlap, they can exhibit either constructive or destructive interference. Constructive interference arises when the peaks of the waves coincide, resulting in a wave with a larger amplitude. Destructive interference occurs when the troughs of the waves align, causing the waves to cancel each other out and produce a wave with a smaller amplitude.
Coherent sources play a vital role in generating interference patterns. Examples of coherent sources include lasers, radio antennas, and sound waves emitted from a tuning fork.
Interference patterns have practical applications in various fields. In distance measurement, the interference patterns produced by lasers can be used to accurately measure the distance to the moon or between objects on Earth. By analyzing the interference patterns, scientists can obtain precise measurements.
In the study of light, interference patterns provide valuable insights into the nature of light. They can be used to determine the wavelength of light, analyze the properties of different light sources, and investigate phenomena like diffraction and polarization.
Interference patterns also have aesthetic appeal and are utilized in creating visually captivating designs. For instance, soap bubbles exhibit colorful interference patterns due to the interaction of light waves reflected from the inner and outer surfaces of the thin soap film.
The experiment consists of a monochromatic light source S, which serves as a coherent source of light. The light emitted from the source passes through two slits, S1 and S2, which are separated by a distance d. These slits act as secondary sources of light waves. The waves generated from S1 and S2 propagate to a screen positioned at a distance D from the slits.
The path difference between the light rays reaching a point P on the screen from the two slits is given by the equation:
Δd = d sin θ
Here, θ represents the angle between the line connecting point P to slit S1 and the normal to the screen.
When the path difference Δd is equal to an integer multiple of the wavelength λ of the light, the light waves from the two slits interfere constructively, resulting in a bright band on the screen. This can be expressed as:
Δd = mλ
where m is an integer.
Conversely, when the path difference Δd is equal to an odd multiple of half the wavelength of the light, the light waves from the two slits interfere destructively, leading to a dark band on the screen. This can be represented by the equation:
Δd = (m + 1/2)λ
The alternating bright and dark bands observed on the screen form an interference pattern. The spacing between these bands, known as the fringe width, can be determined by the equation:
dλ/D
The derivation of Young‘s double-slit experiment demonstrates that the interference pattern arises due to the wave nature of light. This pattern allows for the measurement of various properties, including the wavelength of light, the distance between the slits, and the distance to the screen.
In addition, we can analyze the interference pattern using the equation:
I ∝ 4 * A^2 * sin^2 ( (π * Δx) / λ) * cos^2 (ωt + δ/2)
Here, I represents the intensity of the light at point P, A is the amplitude of the waves, ω is the angular frequency, t is time, δ is the phase difference between the waves from S1 and S2, and sin^2 ( (π * Δx) / λ) represents the interference pattern resulting from the path difference.
The term cos^2 (ωt + δ/2) accounts for the time variation of the intensity, contributing to the temporal behavior of the light intensity.
The interference pattern observed in Young‘s double-slit experiment serves as a fundamental demonstration of the wave nature of light. This experiment has been replicated extensively and has been utilized in the study of light properties, including coherence, as well as in the investigation of other wave phenomena such as sound waves and water waves.
Diffraction
Diffraction is a phenomenon that occurs when waves encounter an obstacle or pass through an aperture, causing them to bend or spread out. It is a characteristic behavior of waves, including light, sound, and water waves. Diffraction can be observed when waves encounter objects that have dimensions on the order of their wavelength.
When waves encounter an obstacle or a narrow opening, such as a slit, the waves spread out in all directions beyond the obstacle or aperture. This spreading out of waves is known as diffraction. The amount of diffraction depends on the size of the obstacle or aperture relative to the wavelength of the waves.
Diffraction can be understood usingHuygen‘s principle, which states that every point on a wavefront acts as a source of secondary wavelets that spread out in all directions. These secondary wavelets interfere with each other, resulting in the observed diffraction pattern.
The diffraction pattern consists of a central maximum and alternating bright and dark fringes on either side. The central maximum is the brightest point in the pattern, and the intensity decreases as the distance from the central maximum increases. The spacing between the fringes depends on the wavelength of the waves and the size of the aperture or obstacle.
The diffraction pattern can be characterized by the following properties:
Diffraction plays a crucial role in various fields, including optics, acoustics, and radio waves. It affects the resolution of optical instruments, such as microscopes and telescopes, and it is also utilized in diffraction gratings for spectroscopy and wavelength analysis. Understanding diffraction helps in the study of wave behavior and enables the manipulation of waves for practical applications.
Single Slit Diffraction
Single slit diffraction is the bending of light around a sharp edge. When light passes through a narrow slit, the waves from the edges of the slit interfere with each other, creating a pattern of bright and dark bands on a screen behind the slit. The pattern is called a diffraction pattern.
Single Slit Diffraction Pattern
The single slit diffraction pattern can be observed when a coherent wave, such as light or sound, passes through a single slit aperture. The wavefronts from different parts of the slit interfere with each other, resulting in constructive and destructive interference.
The central maximum of the diffraction pattern is the brightest region and is located at the center of the screen. The intensity of the light or sound is highest at the central maximum. On either side of the central maximum, there are a series of narrower and dimmer fringes, known as secondary maxima and minima.
The width of the central maximum is wider than that of the fringes. The angular width of the central maximum, θ, can be approximated using the equation:
θ ≈ λ / a
where θ is the angular width, λ is the wavelength of the wave, and a is the width of the slit.
The spacing between the fringes depends on the wavelength of the wave and the width of the slit. The distance between adjacent minima, known as the fringe separation, can be approximated using the equation:
d ≈ λ / sin (θ)
where d is the fringe separation and θ is the angle to the respective minimum.
Applications of Single Slit Diffraction
The single slit diffraction pattern demonstrates the wave nature of light and other waves. It has important applications in fields such as optics, where it affects the resolution of optical instruments, and spectroscopy, where it is used to analyze the wavelengths of light.
Example
Let‘s say we have a light source with a wavelength of 500 nanometers (nm) and we want to calculate the angular width of the central maximum when the light passes through a slit with a width of 100 micrometers (μm).
Using the equation, we get:
θ ≈ λ / a = 500 nm / 100 μm = 0.5 degrees
This means that the central maximum of the diffraction pattern will be about 0.5 degrees wide.
Conclusion
Single slit diffraction is a common phenomenon that can be observed in many everyday situations. It is also used in many scientific instruments, such as spectrometers and laser interferometers. The single slit diffraction pattern demonstrates the wave nature of light and other waves, and it has important applications in fields such as optics and spectroscopy.
Diffraction Pattern of Image: Diffraction Grating
Diffraction grating is an optical device consisting of a large number of evenly spaced parallel slits or lines. When light passes through a diffraction grating, it undergoes diffraction and produces a characteristic pattern of bright and dark fringes.
The diffraction pattern formed by a diffraction grating is a series of equally spaced bright fringes, known as orders, separated by dark regions. The intensity of the bright fringes decreases as the order increases.
The spacing between the fringes in the diffraction pattern depends on the wavelength of the light and the spacing of the slits on the grating. The equation that relates the fringe spacing (d), the wavelength (λ), and the angle of diffraction (θ) is given by:
d * sin (θ) = m * λ
where d is the spacing of the slits on the grating, θ is the angle of diffraction, m is the order of the fringe, and λ is the wavelength of the light.
The diffraction pattern of a diffraction grating is used in spectroscopy to separate and analyze the different wavelengths of light. By measuring the angles and intensities of the fringes, the spectrum of the incoming light can be determined.
Applications of diffraction gratings include spectroscopes, spectrometers, wavelength division multiplexing (WDM) in optical communication, and laser tuning.
Resolving Power of Optical Instruments
The resolving power of an optical instrument refers to its ability to distinguish two closely spaced objects as separate and distinct. It is a measure of the instrument‘s ability to resolve fine details or features in an observed object.
The resolving power of an optical instrument depends on various factors, including the wavelength of light used, the aperture size of the instrument, and the quality of the optics. The following are two commonly used formulas for calculating the resolving power:
Rayleigh‘s Criterion:
The minimum resolvable angle (θ) according to Rayleigh‘s criterion is given by:
θ = 1.22 * (λ / D)
where θ is the minimum resolvable angle, λ is the wavelength of light used, and D is the diameter of the aperture or lens of the instrument.
The smaller the value of θ, the better the resolving power of the instrument. This criterion provides a measure of the smallest angular separation that can be resolved by the instrument.
Sparrow‘s Criterion:
Sparrow‘s criterion takes into account the contrast sensitivity of the human eye. The minimum resolvable angle (θ) according to Sparrow‘s criterion is given by:
θ = 1.22 * (λ / (D * C))
where θ is the minimum resolvable angle, λ is the wavelength of light used, D is the diameter of the aperture or lens of the instrument, and C is the contrast threshold of the observer.
Both Rayleigh‘s and Sparrow‘s criteria provide an estimation of the resolving power of an optical instrument. A higher resolving power allows for finer details to be observed and distinguished.
It‘s important to note that these formulas provide approximate values and are based on ideal conditions. Real-world factors such as aberrations, atmospheric conditions, and limitations of the observer‘s visual system can affect the actual resolving power achieved.
Polarization
Polarization refers to the orientation of the electric field vector associated with an electromagnetic wave. It describes the direction in which the electric field oscillates as the wave propagates through space.
Light waves are transverse waves, which means that the electric and magnetic fields oscillate perpendicular to the direction of wave propagation. In an unpolarized light wave, the electric field vector can vibrate in any direction perpendicular to the direction of propagation.
When light undergoes polarization, the electric field vector is restricted to oscillate in a specific direction or plane. This results in a polarized light wave, where the electric field oscillates in a well-defined orientation.
There are several ways in which light can become polarized:
Polarization of light has various applications in different fields, including:
Phenomenon of Polarization
The phenomenon of polarization occurs when light waves undergo certain interactions or pass through specific materials, resulting in the restriction of the electric field vector to oscillate in a specific direction or plane. This leads to the creation of polarized light with a well-defined orientation of the electric field.
There are several key phenomena associated with polarization:
These phenomena of polarization have significant implications in various fields and applications, including optics, telecommunications, photography, and material science. Understanding and controlling polarization allows for the manipulation and utilization of light in diverse ways, leading to advancements in technology and scientific research.
Brewster‘s Law
Brewster‘s law, also known as the polarization law, describes the relationship between the angle of incidence and the angle of polarization for light waves reflecting off a dielectric surface. According to Brewster‘s law, when light strikes a surface at a specific angle called the Brewster‘s angle (θB), the reflected light becomes completely polarized, with the electric field vector parallel to the reflecting surface.
The mathematical expression of Brewster‘s law is:
tan (θB) = n2/ n1
where θBis the Brewster‘s angle, n1is the refractive index of the incident medium, and n2is the refractive index of the medium the light is entering.
Brewster‘s law has practical applications in various fields, such as optics, photography, and telecommunications. It is commonly used to reduce glare and unwanted reflections by employing polarizing filters or coatings at the Brewster‘s angle.
Transverse Nature of Light
Light is an electromagnetic wave, and it exhibits a transverse nature. This means that the electric and magnetic fields oscillate perpendicular to the direction of propagation of the light wave. The electric field vector represents the polarization direction of the light wave.
Some key characteristics of the transverse nature of light include:
The transverse nature of light is crucial for understanding and analyzing various optical phenomena, including polarization, interference, and diffraction. It forms the basis for many applications in optics, telecommunications, imaging, and other fields of science and technology.
Polaroid
A polaroid, also known as a polarizing filter, is an optical device that selectively filters light waves based on their polarization direction. It consists of a material that allows only light waves with a specific polarization orientation to pass through, while blocking or attenuating light waves with other polarization orientations.
Polaroids are commonly made from a stretched polymer film that contains microscopic aligned crystals or molecules. These molecules have anisotropic properties, meaning they exhibit different optical properties depending on the direction of the light wave‘s electric field vector.
When unpolarized light passes through a polaroid, it becomes linearly polarized. The polaroid acts as a selective filter, transmitting only the component of light that is parallel to its polarization axis and absorbing or reflecting the perpendicular component.
The main characteristics and applications of polaroids include:
Polaroids have widespread applications in various fields, including photography, cinematography, optics, scientific research, and everyday devices like sunglasses and 3D glasses. They play a crucial role in controlling and manipulating the polarization state of light for practical and scientific purposes.
Kirchhoff‘s Law
Kirchhoff‘s laws are fundamental principles in electrical circuit analysis that describe the behavior of currents and voltages in a closed circuit. They are named after the German physicist Gustav Kirchhoff.
Kirchhoff‘s laws include:
Kirchhoff‘s laws are used to analyze and solve complex electrical circuits by applying these principles to determine unknown currents and voltages. They provide a systematic and mathematical approach to circuit analysis, allowing engineers and physicists to understand and predict the behavior of electrical systems.
Wheatstone Bridge Circuit
The Wheatstone bridge circuit is a fundamental electrical circuit used for measuring unknown resistances. It consists of a bridge configuration of resistors and a galvanometer (a sensitive current-measuring instrument).
The Wheatstone bridge circuit is commonly used in various applications, including precision resistance measurements and strain gauge measurements. It operates based on the principle of balancing a bridge circuit by adjusting the values of known resistors to nullify the current flowing through the galvanometer.
When the Wheatstone bridge circuit is balanced, the ratio of the resistances in the arms of the bridge can be used to determine the value of the unknown resistance. This is achieved by adjusting the known resistances until the galvanometer shows zero deflection, indicating that no current is flowing through it.
The equation governing the Wheatstone bridge circuit is:
V1 / R1 = VR2Where V1 and V2 are the voltages across the resistors R1 and R2 respectively. By rearranging this equation, the value of the unknown resistance can be calculated.
The Wheatstone bridge circuit finds applications in various fields such as electrical engineering, physics, and metrology, where accurate resistance measurements are required.
Meter Bridge
The meter bridge, also known as the slide wire bridge or the Carey Foster bridge, is a device used to measure the unknown resistance of a conductor. It is a modified version of the Wheatstone bridge circuit.
The meter bridge consists of a long uniform wire, typically made of manganin or constantan, which is divided into two arms. A known resistance is connected in series with one arm, and the unknown resistance is connected in series with the other arm.
A galvanometer is connected between the junction of the two arms and a sliding contact, which can be moved along the wire to obtain a null point. The null point is the position where the galvanometer shows zero deflection, indicating that the bridge is balanced.
The ratio of the lengths of the wire on either side of the null point can be used to determine the unknown resistance. This is achieved by adjusting the sliding contact until the galvanometer shows zero deflection.
The equation governing the meter bridge is:
R1 / R2 = l1 / l2Where R1 is the known resistance, R2 is the unknown resistance, l1 is the length of the wire on one side of the null point, and l2 is the length of the wire on the other side of the null point.
The meter bridge is a simple and effective tool for measuring resistance and is commonly used in laboratories and educational settings.
Potentiometer: Comparison of EMF of Cells and Measurement of Internal Resistance
A potentiometer is a versatile instrument used for various electrical measurements, including the comparison of electromotive forces (EMF) of cells and the measurement of internal resistance.
Comparison of EMF of Cells
In order to compare the EMF of two or more cells, a potentiometer is connected in series with a resistor. The potentiometer is adjusted until the voltage drop across the resistor is equal for both cells, resulting in equal currents. By comparing the resistances, the EMF of the cells can be compared.
Measurement of Internal Resistance of a Cell
To measure the internal resistance of a cell using a potentiometer:
R = V / Iwhere R is the internal resistance of the cell, V is the voltage drop across the resistor, and I is the current through the resistor.
Applications of Potentiometers
Potentiometers find applications in various fields, including:
Potentiometers are widely used due to their versatility, affordability, and ease of use in different electrical measurements and circuits.
Superconductors
Superconductors and perfect conductors are both materials with zero electrical resistance. However, there are some key differences between the two.
Superconductors are materials that exhibit zero resistance below a certain temperature, called the critical temperature. This means that when a superconductor is cooled below its critical temperature, it can carry an infinite amount of current without losing any energy.
Superconductors have many potential applications, including:
Perfect Conductors
Perfect conductors are hypothetical materials that have zero resistance at all temperatures. Perfect conductors do not exist in nature, but they are often used in theoretical calculations.
If perfect conductors were to be discovered, they could have potential applications such as:
While perfect conductors do not exist in nature, they are an important theoretical concept in physics. Superconductors are real materials that have many potential applications and are being actively researched.
Conversion of Galvanometer into Voltmeter:
Galvanometer:
A galvanometer is an instrument that detects and measures small electric currents. It consists of a coil of wire suspended in a magnetic field. When a current passes through the coil, it experiences a torque that causes the coil to rotate. The deflection of the coil is proportional to the current flowing through it. Galvanometers are commonly used as the basis for ammeters, which measure current, and can also be used as sensitive indicators in various measuring instruments.
Ohmmeter:
An ohmmeter is a device used to measure the resistance of an electrical component. It typically consists of a known voltage source and a galvanometer. When connected to a component, the ohmmeter applies a voltage and measures the resulting current. By using Ohm‘s law (R = V/I), the resistance of the component can be calculated. Ohmmeters are commonly used in electrical and electronic circuits to measure resistance values.
In summary, converting a galvanometer into a voltmeter involves adding a shunt resistor in parallel. Galvanometers are used to measure small currents, while ohmmeters are used to measure resistance values.
Joule‘s Law of Heating:
Joule‘s Law of Heating states that the heat produced in a conductor is directly proportional to the square of the current passing through it, the resistance of the conductor, and the time for which the current flows. Mathematically, it can be expressed as:
H = I^2 * R * t
Where:
Joule‘s Law of Heating is based on the principle that electrical energy is converted into heat energy when an electric current passes through a conductor with resistance. It finds applications in various practical scenarios, such as electric heating elements, electric stoves, and electric water heaters.
By understanding Joule‘s Law of Heating, engineers and scientists can design and optimize electrical systems for efficient and safe operation.
It is important to note that the above equation assumes that the conductor‘s temperature remains constant during the heating process.
Joule‘s Law of Heating is a fundamental principle in the study of electrical circuits and plays a crucial role in understanding the effects of current flow and resistance in practical applications.
Overall, Joule‘s Law of Heating provides a quantitative relationship between the heat produced, current, resistance, and time, enabling the calculation and control of heat generation in electrical systems.
Thermoelectric Effect
The thermoelectric effect refers to the phenomenon of generating an electric potential difference (voltage) across a junction of two dissimilar materials when there is a temperature gradient applied to the junction. It is based on the principle of the Seebeck effect, which states that a temperature difference across a conductor or semiconductor creates a voltage difference.
Types of Thermoelectric Effects
There are two primary types of thermoelectric effects:
Applications of the Thermoelectric Effect
The thermoelectric effect has various applications, including:
The thermoelectric effect plays a crucial role in energy conversion, temperature sensing, and cooling technologies. Ongoing research focuses on improving the efficiency of thermoelectric materials and exploring new applications in energy harvesting and waste heat recovery.
Peltier Effect
The Peltier effect is a phenomenon in thermoelectricity where an electric current flowing through the junction of two dissimilar materials causes a temperature difference. It is the reverse of the Seebeck effect, which produces an electric potential difference when a temperature gradient is applied. The Peltier effect can be summarized as follows:
Variation of Thermoelectric EMF with Temperature
The thermoelectric electromotive force (EMF), also known as the Seebeck coefficient, is a measure of the voltage generated across a thermoelectric material when a temperature gradient is applied. The EMF depends on the material properties and the temperature difference across the material.
The relationship between the thermoelectric EMF and temperature can be described by the following equation:
E = αθ + 1/2βθ²
Where:
This equation shows that the thermoelectric EMF is a linear function of the temperature difference (αθ term) and a quadratic function of the temperature difference (1/2βθ² term).
At low temperature differences, the linear term dominates, resulting in a nearly linear relationship between the EMF and temperature. However, as the temperature difference increases, the quadratic term becomes more significant, causing nonlinearity in the relationship.
Specific temperature points of interest in thermoelectric systems include the temperature of inversion and the neutral temperature, which can be determined based on the values of α and β.
Thermopile
A thermopile is a device consisting of multiple thermocouples connected in series or parallel. It is used to measure temperature differences or generate electrical power based on the thermoelectric effect. The thermopile enhances the voltage output by combining the individual voltages of multiple thermocouples.
Key features and applications of thermopiles include:
Thermopiles are versatile devices that find applications in temperature measurement, energy harvesting, thermal imaging, and temperature compensation. Their enhanced voltage output and sensitivity make them valuable in various industries and scientific fields.
Magnetic Field Lines and Magnetic Flux
Magnetic field lines are visual representations used to illustrate the direction and strength of magnetic fields. They provide a way to visualize the magnetic field around a magnet or a current-carrying conductor. Here are some key points about magnetic field lines and magnetic flux:
Oersted‘s Experiment
Oersted‘s experiment, conducted by Hans Christian Oersted in 1820, provided one of the earliest demonstrations of the relationship between electric current and magnetic fields. The experiment showed that a current-carrying conductor can deflect a nearby magnetic compass needle. Here are the key details of Oersted‘s experiment:
Oersted‘s experiment laid the foundation for the development of electromagnetism and contributed to the understanding of the fundamental interplay between electricity and magnetism.
Force of Moving Charge
When a charged particle, such as an electron or a proton, moves in a magnetic field, it experiences a force known as the magnetic force. The magnetic force on a moving charge is perpendicular to both the velocity of the charge and the magnetic field direction. Here are some key points about the force of a moving charge:
Force on a Conductor
When an electric current flows through a conductor placed in a magnetic field, the conductor experiences a force known as the magnetic force. The force on a current-carrying conductor is perpendicular to both the current direction and the magnetic field direction. Here are some key points about the force on a conductor:
The force of a moving charge and the force on a conductor in a magnetic field are fundamental concepts in electromagnetism and have various applications in electrical devices and technologies.
Force and Torque on a Rectangular Coil
When a rectangular coil carrying a current is placed in a magnetic field, it experiences both a force and a torque. The force and torque on the coil are crucial in understanding the working principle of a moving coil galvanometer. Here is a detailed explanation of the force and torque on a rectangular coil:
Force on a Rectangular Coil:
When a current-carrying rectangular coil is placed in a magnetic field, each side of the coil experiences a force due to the interaction between the current and the magnetic field. The force on each side of the coil can be calculated using the formula:
F = BIL
Where F is the force on each side of the coil, B is the magnetic field strength, I is the current flowing through the coil, and L is the length of each side of the coil.
The direction of the force on each side of the coil can be determined using the right-hand rule. If the fingers of the right hand are curled in the direction of the current, the thumb points in the direction of the force on the side of the coil.
The net force on the rectangular coil is the vector sum of the forces on each side. The forces on opposite sides of the coil are equal in magnitude and opposite in direction, resulting in a net force of zero in a uniform magnetic field.
Torque on a Rectangular Coil:
When a current-carrying rectangular coil is placed in a magnetic field, it experiences a torque that tends to rotate the coil. The torque can be calculated using the formula:
T = NIABsinθ
Where T is the torque on the coil, N is the number of turns in the coil, I is the current flowing through the coil, A is the area of the coil, B is the magnetic field strength, and θ is the angle between the magnetic field and the normal to the plane of the coil.
The direction of the torque can be determined using the right-hand rule. If the fingers of the right hand are curled in the direction of the current, and the thumb points in the direction of the magnetic field, the palm represents the direction of the torque on the coil.
Moving Coil Galvanometer:
A moving coil galvanometer is an instrument that measures small electric currents. It consists of a rectangular coil suspended in a uniform magnetic field. When a current flows through the coil, the torque exerted on the coil causes it to rotate. The rotation of the coil is proportional to the current passing through it, allowing for current measurement.
The torque exerted on the coil can be balanced by a restoring torque, typically provided by a spring. The deflection of the coil is indicated by a pointer attached to the coil, allowing for reading the current value from a calibrated scale.
The sensitivity of a moving coil galvanometer can be increased by increasing the number of turns in the coil, using a stronger magnetic field, or decreasing the moment of inertia of the coil.
The force and torque on a rectangular coil and their applications in a moving coil galvanometer provide a basis for measuring electrical currents accurately.
Hall Effect
The Hall effect is a phenomenon in physics that describes the generation of a voltage across a conductor when it is placed in a magnetic field and a current flows through it. The Hall effect is widely used to measure the strength and direction of magnetic fields, as well as to determine the properties of conductive materials. Here is a detailed explanation of the Hall effect, including its derivation:
Derivation of the Hall Effect:
Consider a rectangular conductor of width ‘w‘, height ‘h‘, and length ‘l‘ placed in a magnetic field ‘B‘ directed perpendicular to the plane of the conductor.
When a current ‘I‘ flows through the conductor in the positive x-direction, the Lorentz force experienced by the moving charges is given by:
F = qvB
Where F is the force, q is the charge of the moving particles, v is the drift velocity, and B is the magnetic field strength.
Since the current is flowing in the x-direction, the electrons experience a force in the negative y-direction due to the negative charge of the electrons.
The force causes the charges to accumulate on one side of the conductor, resulting in an electric field ‘E‘ in the y-direction.
The electric field creates a potential difference across the conductor, causing a voltage ‘V‘ to develop across the width of the conductor.
The magnitude of the electric field is given by:
E = V/w
By equating the electric and magnetic forces, we have:
qvB = qE
vB = E
v = E/B
The drift velocity ‘v‘ of the charges is directly proportional to the electric field ‘E‘ and inversely proportional to the magnetic field strength ‘B‘.
The Hall coefficient ‘R_H‘ is defined as the ratio of the electric field ‘E‘ to the product of the current density ‘J‘ and the magnetic field ‘B‘:
R_H = E/ (J x B)
Substituting the expression for the electric field ‘E‘ and the current density ‘J‘ (J = I/ (w x h)), we have:
R_H = V/ (I x B x h)
R_H is a material-dependent quantity and is known as the Hall coefficient.
The Hall coefficient ‘R_H‘ can be positive or negative, depending on the type of charge carriers (electrons or holes) and the direction of the magnetic field.
The sign of ‘R_H‘ can be used to determine the type of charge carriers and the dominant charge carrier in a conductor.
The Hall effect can be used to measure the magnetic field strength, as the voltage ‘V‘ across the conductor is directly proportional to the magnetic field ‘B‘.
The Hall effect also provides information about the properties of conductive materials, such as the density and mobility of charge carriers.
The Hall effect is a fundamental principle that finds applications in various fields, including magnetic field measurement, semiconductor characterization, and current sensing.
Magnetic Field of Moving Charge
The magnetic field produced by a moving charge is a fundamental concept in electromagnetism. When a charged particle moves with a velocity ‘v‘, it creates a magnetic field in its surrounding space. The magnetic field can be calculated using Ampere‘s law and the Biot-Savart law. Here is a derivation of the magnetic field produced by a moving charge:
Derivation:
Consider a point charge ‘q‘ moving with a velocity ‘v‘. We want to determine the magnetic field at a point ‘P‘ located at a distance ‘r‘ from the moving charge.
According to the Biot-Savart law, the magnetic field ‘B‘ at point ‘P‘ is given by:
B = (μ₀ / 4π) * (q * v x r) / r³
Where μ₀ is the permeability of free space, ‘x‘ represents the cross product, and ‘r‘ is the distance from the charge to the point at which the magnetic field is being calculated.
The cross product ‘v x r‘ gives a vector that is perpendicular to both the velocity ‘v‘ and the position vector ‘r‘.
Since the velocity ‘v‘ is perpendicular to the magnetic field ‘B‘, the magnitude of ‘v x r‘ is equal to the product of the magnitudes of ‘v‘ and ‘r‘.
The magnetic field can be simplified as:
B = (μ₀ / 4π) * (q * v * sinθ) / r²
Where θ is the angle between the velocity vector ‘v‘ and the position vector ‘r‘.
From the above expression, we can observe that the magnitude of the magnetic field decreases with the square of the distance ‘r‘ from the moving charge.
The direction of the magnetic field is determined by the right-hand rule, where the thumb points in the direction of the velocity ‘v‘, and the curled fingers indicate the direction of the magnetic field.
It is important to note that the magnetic field produced by a moving charge is different from that produced by a current-carrying wire. The magnetic field of a moving charge spreads out in a spherical pattern.
The magnetic field produced by a moving charge has various applications in physics and engineering, such as particle accelerators, mass spectrometers, and the study of charged particle motion in magnetic fields.
Biot-Savart Law
The Biot-Savart law is a fundamental principle in electromagnetism that describes the magnetic field generated by a steady current in a wire. It provides a quantitative relationship between the current-carrying element, the magnetic field it produces, and the distance from the element. The law is named after Jean-Baptiste Biot and Félix Savart, who formulated it in the early 19th century.
The Biot-Savart law states that the magnetic field at a point in space due to a small current-carrying element is directly proportional to the magnitude of the current, the length of the element, the sine of the angle between the element and the line connecting the element to the point, and inversely proportional to the square of the distance between the element and the point.
The mathematical expression of the Biot-Savart law is given as:
B = (μ₀ / 4π) * (I * dl x r) / r³
Where B is the magnetic field at the point of interest, I is the current flowing through the element, dl is the infinitesimal length element, r is the displacement vector from the element to the point, μ₀ is the permeability of free space (a constant), and x represents the cross product.
The Biot-Savart law is used to calculate the magnetic field produced by various current-carrying geometries, such as straight wires, circular loops, and solenoids. By integrating the contributions of all the current-carrying elements along a path, the total magnetic field at a point can be determined.
The Biot-Savart law is a key principle in the study of electromagnetism and finds applications in various fields, including electrical engineering, physics, and magnetism. It provides a fundamental tool for understanding and analyzing the behavior of magnetic fields generated by electric currents.
Application of Biot-Savart Law on a Circular Coil
To calculate the magnetic field at the center of a circular coil using the Biot-Savart law, consider a circular coil of radius R carrying a current I. Let P be the point at the center of the coil. Let dl be a small element of the coil, and r be the distance between dl and P. The magnetic field dB due to dl at P is given by the Biot-Savart law:
dB = (μ₀ / 4π) * (I * dl × r̂) / r²
The total magnetic field at P is obtained by integrating the contributions of all the current-carrying elements of the coil:
B = ∫dB = (μ₀ / 4π) * I * ∫ (dl × r̂) / r²
The resulting expression for the magnetic field B at the center of the circular coil is:
B = (μ₀ * I * R²) / (2 * (R² + z²)^ (3/2))
where z is the distance from the center of the coil along its axis.
Application of Biot-Savart Law on a Long Straight Conductor
To calculate the magnetic field due to a long straight conductor using the Biot-Savart law, consider a conductor carrying a current I. Let P be a point at a distance r from the conductor. The magnetic field dB due to the conductor at P is given by the Biot-Savart law:
dB = (μ₀ / 4π) * (I * dl × r̂) / r²
Integrating the contributions of all the current-carrying elements of the conductor, the magnetic field B due to a long straight conductor is:
B = (μ₀ * I) / (2π * r)
Application of Biot-Savart Law on a Long Solenoid
To calculate the magnetic field inside a long solenoid using the Biot-Savart law, consider a solenoid of length L, radius R, and carrying a current I. Let P be a point inside the solenoid. Let dl be a small element of the solenoid, and r be the distance between dl and P. The magnetic field dB due to dl at P is given by the Biot-Savart law:
dB = (μ₀ / 4π) * (I * dl × r̂) / r²
The total magnetic field inside the solenoid is obtained by integrating the contributions of all the current-carrying elements of the solenoid:
B = ∫dB = (μ₀ / 4π) * I * ∫ (dl × r̂) / r²
The resulting expression for the magnetic field B inside a long solenoid is:
B = μ₀ * n * I / L
where n is the number of turns per unit length of the solenoid.
Ampere‘s Law
Ampere‘s Law is a fundamental law in electromagnetism that relates the magnetic field around a closed loop to the electric current passing through the loop. It states that the line integral of the magnetic field around a closed path is equal to the product of the permeability of free space (μ₀) and the total current passing through the surface bounded by the loop:
∮B · dl = μ₀ * I_total
where B is the magnetic field, dl is a small element of the path, and I_total is the total current passing through the surface bounded by the loop.
Application of Ampere‘s Law on a Long Straight Conductor
When applying Ampere‘s Law to a long straight conductor carrying a current I, we consider a closed loop around the conductor. The magnetic field B is constant in magnitude along the loop and perpendicular to it. The path of integration is chosen as a circular loop with radius r centered on the conductor.
Using Ampere‘s Law, we have:
∮B · dl = μ₀ * I_total
B * 2πr = μ₀ * I
B = (μ₀ * I) / (2πr)
This is the expression for the magnetic field B at a distance r from a long straight conductor.
Application of Ampere‘s Law on a Straight Solenoid
When applying Ampere‘s Law to a straight solenoid, we consider a closed loop that encircles the solenoid. The magnetic field B inside the solenoid is constant in magnitude and direction.
Using Ampere‘s Law, we have:
∮B · dl = μ₀ * I_total
B * 2πr = μ₀ * (N * I)
B = (μ₀ * N * I) / (2πr)
This is the expression for the magnetic field B inside a straight solenoid, where N is the number of turns per unit length.
Application of Ampere‘s Law on a Toroidal Solenoid
When applying Ampere‘s Law to a toroidal solenoid, we consider a closed loop that encircles the toroidal solenoid. The magnetic field B inside the toroid is constant in magnitude and direction.
Using Ampere‘s Law, we have:
∮B · dl = μ₀ * I_total
B * 2πr = μ₀ * (N * I)
B = (μ₀ * N * I) / (2πr)
This is the expression for the magnetic field B inside a toroidal solenoid, where N is the number of turns per unit length.
Ampere‘s Law and its Applications
Ampere‘s Law:
Ampere‘s law relates the magnetic field around a closed loop to the electric current passing through the loop. It states that the magnetic field line integral around a closed loop is equal to the product of the permeability of free space (μ₀) and the total current passing through the loop.
Application of Ampere‘s Law:
i. Force between Two Parallel Conductors Carrying Current:
The force between two parallel conductors carrying current can be calculated using Ampere‘s law. The force (F) is given by the formula:
F = (μ₀ * I₁ * I₂ * L) / (2π * d)
where F is the force between the conductors, I₁ and I₂ are the currents in the conductors, L is the length of the conductors, d is the distance between the conductors, and μ₀ is the permeability of free space.
ii. Magnetic Field of a Long Straight Conductor:
The magnetic field (B) around a long straight conductor can be determined using Ampere‘s law. For an infinite conductor, the magnetic field is given by:
B = (μ₀ * I) / (2π * r)
where B is the magnetic field, I is the current in the conductor, r is the distance from the conductor, and μ₀ is the permeability of free space.
iii. Magnetic Field of a Straight Solenoid:
Ampere‘s law can be applied to determine the magnetic field inside a straight solenoid. The magnetic field (B) inside an ideal solenoid with n turns per unit length and carrying a current I is given by:
B = μ₀ * n * I
where B is the magnetic field, n is the number of turns per unit length, I is the current in the solenoid, and μ₀ is the permeability of free space.
iv. Magnetic Field of a Toroidal Solenoid:
A toroidal solenoid is a coil wound in the shape of a torus. The magnetic field inside the toroidal solenoid is given by Ampere‘s law as:
B = μ₀ * n * I
where B is the magnetic field, n is the number of turns per unit length, I is the current in the solenoid, and μ₀ is the permeability of free space.
In summary, Ampere‘s law is a fundamental principle in electromagnetism, and it has various applications such as calculating the force between parallel conductors, determining the magnetic field of a long straight conductor, a straight solenoid, and a toroidal solenoid.
Flux Density in Magnetic Material
Flux density, also known as magnetic induction or magnetic field density, refers to the amount of magnetic field passing through a given area of a magnetic material. It is denoted by the symbol B and is measured in teslas (T) or gauss (G).
In magnetic materials, the flux density is related to the magnetic field strength (H) by the permeability of the material (μ). The relationship is given by:
B = μ * H
where B is the flux density, μ is the permeability, and H is the magnetic field strength.
Relative Permeability
Relative permeability is a measure of how easily a magnetic material can be magnetized compared to vacuum or free space. It is denoted by the symbol μror simply μr.
Relative permeability is defined as the ratio of the permeability of the material (μ) to the permeability of free space (μ₀):
μr= μ / μ₀
It quantifies the extent to which a magnetic material enhances or diminishes the magnetic field compared to free space. A material with a relative permeability greater than 1 is considered to be a "magnetic" material, while a relative permeability less than 1 indicates a "non-magnetic" or "diamagnetic" material.
Susceptibility
Susceptibility is a property of a material that describes its response to an applied magnetic field. It is denoted by the symbol χ (chi).
Susceptibility is defined as the ratio of the magnetization of a material (M) to the applied magnetic field strength (H):
χ = M / H
It represents the degree to which a material can become magnetized when exposed to an external magnetic field. The susceptibility value can be positive, negative, or zero, depending on the type of material and its response to the magnetic field.
In summary, flux density in magnetic materials is determined by the permeability and magnetic field strength. Relative permeability compares the permeability of a material to that of free space. Susceptibility measures the material‘s response to an applied magnetic field.
Hysteresis
Hysteresis refers to the phenomenon observed in some materials where the magnetization of the material lags behind the applied magnetic field. It is the tendency of a material to retain some magnetization even after the removal of the external magnetic field.
In the context of magnetic materials, hysteresis is commonly observed in ferromagnetic and ferrimagnetic materials. These materials exhibit a characteristic hysteresis loop when subjected to a varying magnetic field.
The hysteresis loop is a graphical representation of the relationship between the magnetic field strength (H) and the magnetization (M) of the material. It shows how the magnetic properties of the material change as the magnetic field is increased and then decreased.
When the magnetic field is increased from zero, the material initially exhibits low magnetization, known as the magnetic remanence or residual magnetization. As the field strength increases, the magnetization of the material also increases, reaching a maximum value known as the saturation magnetization.
Upon decreasing the magnetic field, the material does not return to zero magnetization but retains some residual magnetization. This residual magnetization is referred to as the coercivity, which is the measure of the material‘s ability to resist demagnetization.
Hysteresis is significant in various applications, such as in magnetic memory devices, transformers, electric motors, and magnetic data storage. Understanding and controlling hysteresis is crucial for optimizing the performance of these devices.
In summary, hysteresis is the phenomenon of lagging magnetization in response to an applied magnetic field. It is characterized by a hysteresis loop that shows the relationship between the magnetic field strength and magnetization of a material. Hysteresis is important in magnetic applications and materials with ferromagnetic and ferrimagnetic properties.
Diamagnetic Materials:
Diamagnetic materials are a type of materials that exhibit a weak, negative magnetic response when subjected to an external magnetic field. They have no permanent magnetic moments and are not attracted to magnets. Instead, diamagnetic materials generate an induced magnetic field in the opposite direction to the applied magnetic field, causing a repulsive effect.
The magnetic susceptibility (χ) of diamagnetic materials is small and negative, indicating their weak response to magnetic fields. Diamagnetism is a property inherent to all materials, but it is usually overshadowed by other stronger magnetic effects in most substances.
Examples of diamagnetic materials include water, copper, gold, silver, and most organic compounds. Diamagnetic materials can be levitated in strong magnetic fields, as the repulsive force between the material and the magnetic field opposes the force of gravity.
Paramagnetic Materials:
Paramagnetic materials are materials that exhibit a weak, positive magnetic response when subjected to an external magnetic field. Unlike diamagnetic materials, paramagnetic materials have permanent magnetic moments associated with unpaired electrons.
When a paramagnetic material is placed in a magnetic field, the magnetic moments align themselves with the applied field, resulting in a net magnetic moment in the direction of the field. This alignment is temporary and weak, as thermal energy disrupts the alignment when the magnetic field is removed.
Paramagnetic materials have a positive magnetic susceptibility (χ), indicating their weak attraction to magnetic fields. The susceptibility of paramagnetic materials is typically much smaller than that of ferromagnetic materials.
Examples of paramagnetic materials include aluminum, oxygen, titanium, and most transition metal ions. Paramagnetic materials are often used in applications such as magnetic resonance imaging (MRI), magnetic data storage, and magnetic sensors.
Ferromagnetic Materials:
Ferromagnetic materials are a class of materials that exhibit strong permanent magnetization even in the absence of an external magnetic field. They possess a high magnetic susceptibility and can retain their magnetization after the applied magnetic field is removed.
Ferromagnetic materials owe their magnetic properties to the alignment of atomic magnetic moments, which form small magnetic domains within the material. In the absence of an external field, these domains are randomly oriented, resulting in no net magnetization. However, when an external magnetic field is applied, the domains align in the direction of the field, producing a large and permanent magnetization.
Ferromagnetic materials have a positive magnetic susceptibility (χ) that is significantly larger than that of diamagnetic and paramagnetic materials. This property makes them highly attractive to magnets and allows them to exhibit strong magnetic properties.
Examples of ferromagnetic materials include iron, nickel, cobalt, and their alloys. Ferromagnetic materials are widely used in various applications, including transformers, electric motors, magnetic storage media, and magnetic sensors.
In summary, diamagnetic materials exhibit weak negative magnetism, paramagnetic materials exhibit weak positive magnetism, and ferromagnetic materials exhibit strong permanent magnetism. The magnetic properties of these materials depend on the alignment and interaction of atomic magnetic moments within the material.
Electromagnetic Induction (Faraday‘s Laws; Induced Electric Fields)
Electromagnetic induction is the phenomenon of generating an electromotive force (EMF) or electric current in a conductor when it is exposed to a changing magnetic field. This phenomenon is governed by Faraday‘s laws of electromagnetic induction. Let‘s discuss Faraday‘s laws and the induced electric fields in more detail, along with their derivations.
Faraday‘s First Law of Electromagnetic Induction:
According to Faraday‘s first law, when there is a change in the magnetic field through a circuit, an EMF is induced in the circuit. This EMF induces an electric current if the circuit is closed. The magnitude of the induced EMF is directly proportional to the rate of change of magnetic flux through the circuit.
Mathematically, Faraday‘s first law can be stated as:
EMF = -dΦ/dt
Where:
- EMF is the induced electromotive force in the circuit.
- dΦ/dt is the rate of change of magnetic flux through the circuit.
Derivation of Faraday‘s First Law:
Consider a conducting loop placed in a changing magnetic field. Let the magnetic field passing through the loop be B, and the area of the loop be A. The magnetic flux Φ through the loop is given by Φ = B * A.
Now, if the magnetic field B changes with time, then the rate of change of magnetic flux dΦ/dt is given by dΦ/dt = d (B * A)/dt = A * (dB/dt).
According to Faraday‘s law, this rate of change of magnetic flux induces an EMF in the loop. The negative sign indicates the direction of the induced EMF opposes the change in magnetic field.
Faraday‘s Second Law of Electromagnetic Induction:
Faraday‘s second law states that the magnitude of the induced EMF is equal to the rate of change of magnetic flux linkage with respect to time. The magnetic flux linkage is the product of the number of turns in a coil and the magnetic flux passing through each turn.
Mathematically, Faraday‘s second law can be stated as:
EMF = -N * (dΦ/dt)
Where:
- EMF is the induced electromotive force in the circuit.
- N is the number of turns in the coil.
- dΦ/dt is the rate of change of magnetic flux linkage with respect to time.
Derivation of Faraday‘s Second Law:
Consider a coil with N turns placed in a changing magnetic field. The magnetic flux Φ through each turn of the coil is given by Φ = B * A, where B is the magnetic field and A is the area of each turn.
The magnetic flux linkage Φl through the entire coil is the product of the number of turns N and the magnetic flux through each turn, i.e., Φl = N * Φ.
Differentiating both sides of the equation with respect to time, we get d (Φl)/dt = N * (dΦ/dt).
According to Faraday‘s second law, this rate of change of magnetic flux linkage induces an EMF in the coil.
Induced Electric Fields:
When an EMF is induced in a circuit, an electric field is also induced. The induced electric field drives the electric current in the circuit.
For a stationary circuit, the induced electric field is conservative, and the electric potential difference (voltage) is responsible for the flow of electric current.
For a non-stationary circuit, the induced electric field is non-conservative. The changing magnetic field induces an electric field, known as the induced electric field, which is responsible for driving the electric current in the circuit.
This completes the discussion on electromagnetic induction, Faraday‘s laws, and the induced electric fields.
Lenz‘s Law and Conservation of Energy
Lenz‘s law is a fundamental principle in electromagnetism that describes the direction of induced currents in response to a changing magnetic field. It is based on the principle of conservation of energy. Let‘s explore Lenz‘s law and its relationship with the conservation of energy.
Lenz‘s Law:
Lenz‘s law states that the direction of an induced current in a conductor will always be such that it opposes the change that produced it. In other words, the induced current creates a magnetic field that opposes the change in the magnetic field that caused the induction.
This can be summarized by the following statement:
"An induced current will flow in a direction that creates a magnetic field to counteract the change in the magnetic field causing the induction."
Lenz‘s law is a consequence of the conservation of energy and is in accordance with the principle that energy cannot be created or destroyed.
Conservation of Energy:
The principle of conservation of energy states that energy is conserved in a closed system. It can neither be created nor destroyed, but it can be transformed from one form to another.
When applying Lenz‘s law to the induction process, it becomes apparent that the induced current acts in a manner to oppose the change in the magnetic field. By opposing the change, energy is conserved because the work done by the induced current against the changing magnetic field is converted into electrical energy.
This conservation of energy is evident in various practical applications, such as generators, transformers, and electric motors, where the induced currents play a crucial role.
In summary, Lenz‘s law dictates that the induced current always opposes the change in the magnetic field to conserve energy. This principle is rooted in the broader concept of the conservation of energy, which states that energy remains constant within a closed system. The application of Lenz‘s law ensures the efficient utilization of energy in electromagnetic systems.
Motional Electromotive Force
Motional electromotive force (emf) refers to the electromotive force induced in a conductor moving through a magnetic field. It is a fundamental concept in electromagnetism that explains the generation of electric potential difference due to the relative motion between a conductor and a magnetic field.
Faraday‘s Law of Electromagnetic Induction:
Faraday‘s law of electromagnetic induction states that a change in the magnetic field through a conductor induces an emf in the conductor. This induced emf is proportional to the rate of change of magnetic flux through the conductor.
When a conductor moves through a magnetic field, the magnetic flux linked with the conductor changes. This change in flux induces an emf in the conductor, causing charges to move and creating an electric current.
Motional emf Equation:
The motional emf (ε) induced in a conductor moving through a magnetic field is given by the equation:
ε = B * v * L
where B is the magnetic field strength, v is the velocity of the conductor perpendicular to the magnetic field, and L is the length of the conductor.
The motional emf is directly proportional to the magnetic field strength, the velocity of the conductor, and the length of the conductor.
Direction of Motional emf:
The direction of the induced emf can be determined using Lenz‘s law, which states that the induced current will flow in a direction that opposes the change in magnetic flux. The direction of the induced current creates a magnetic field that counteracts the change in the external magnetic field.
Applications of motional emf include electric generators, where mechanical energy is converted into electrical energy, and devices such as velocity sensors, induction-based speedometers, and electromagnetic flowmeters.
In summary, motional emf is the electromotive force induced in a conductor moving through a magnetic field. It follows Faraday‘s law of electromagnetic induction and is determined by the product of the magnetic field strength, the velocity of the conductor, and the length of the conductor. The direction of the induced emf follows Lenz‘s law, opposing the change in magnetic flux.
A.C. Generators
An alternating current (A.C.) generator is a device that converts mechanical energy into electrical energy in the form of an alternating current. It operates on the principle of electromagnetic induction and is commonly used to generate electricity in power plants, homes, and various electrical systems. Here are the key components and working principles of an A.C. generator:
Components of an A.C. Generator:
Working Principle of an A.C. Generator:
Advantages of A.C. Generators:
Applications of A.C. Generators:
In summary, A.C. generators play a crucial role in generating electrical energy in the form of alternating current. They utilize the principle of electromagnetic induction to convert mechanical energy into electrical energy. With their widespread applications and advantages, A.C. generators are an essential component of our modern electrical infrastructure.
Eddy Currents
Eddy currents are swirling currents induced in a conductor when it is exposed to a changing magnetic field. These currents circulate within the conductor in closed loops and create their own magnetic fields. Eddy currents can have both beneficial and detrimental effects depending on the application. Here are some key points about eddy currents:
Formation:
Effect on Conductors:
Applications of Eddy Currents:
Minimizing Eddy Currents:
Eddy currents are an important phenomenon to consider in applications involving changing magnetic fields and conductive materials. While they can result in power losses and heating, they are also utilized in various technologies for heating, braking, and non-destructive testing. Understanding and managing eddy currents is essential for optimizing the performance of electrical and magnetic systems.
Self-Inductance
Self-inductance is a property of a circuit or a coil that causes it to oppose changes in the current flowing through it. It is represented by the symbol L and is measured in henries (H). Self-inductance occurs due to the magnetic field generated by the current in the coil itself. Here is the derivation of self-inductance:
Consider a circuit or a coil with N turns and carrying a current I. The magnetic flux Φ through each turn of the coil is given by Φ = B × A, where B is the magnetic field and A is the area of each turn.
According to Faraday‘s law of electromagnetic induction, the induced electromotive force (emf) in the coil is given by:
E = -dΦ/dt
where dΦ/dt represents the rate of change of magnetic flux with respect to time.
By substituting Φ = B × A, we have:
E = -d (B × A)/dt
Using the product rule of differentiation, we can expand the above equation as:
E = - (dB/dt) × A - B × (dA/dt)
Since A is a constant (area of each turn), dA/dt = 0. Therefore, the equation simplifies to:
E = - (dB/dt) × A
Now, the magnetic field B can be related to the current I using the equation B = μ₀NI/l, where μ₀ is the permeability of free space, N is the number of turns, and l is the length of the coil.
Substituting the above expression into the equation for E, we get:
E = - (d/dt) (μ₀NI/l) × A
E = - (μ₀NA/l) × (dI/dt)
E = -L × (dI/dt)
Comparing this equation with the equation for the induced emf in a coil, we can equate the terms and obtain:
L = (μ₀NA²)/l
This is the expression for self-inductance (L) of a coil, which depends on the permeability of free space (μ₀), the number of turns (N), the cross-sectional area of each turn (A), and the length of the coil (l).
Mutual Inductance
Mutual inductance is a property of two coils that describes the extent to which changes in the current in one coil induce an electromotive force (emf) in the other coil. It is represented by the symbol M and is also measured in henries (H). Here is the derivation of mutual inductance:
Consider two coils, coil 1 and coil 2, placed close to each other. Coil 1 carries a current I1, which produces a magnetic field B1. The magnetic field produced by coil 1 passes through coil 2 and induces an emf in it.
The magnetic flux Φ2 through each turn of coil 2 due to the magnetic field B1 is given by Φ2 = B1 × A2, where A2 is the area of each turn of coil 2.
According to Faraday‘s law of electromagnetic induction, the induced emf in coil 2 is given by:
E2 = -dΦ2/dt
By substituting Φ2 = B1 × A2, we have:
E2 = -d (B1 × A2)/dt
Using the product rule of differentiation, we can expand the above equation as:
E2 = - (dB1/dt) × A2 - B1 × (dA2/dt)
Since A2 is a constant (area of each turn of coil 2), dA2/dt = 0. Therefore, the equation simplifies to:
E2 = - (dB1/dt) × A2
Now, the magnetic field B1 can be related to the current I1 using the equation B1 = μ₀N1I1/l1, where μ₀ is the permeability of free space, N1 is the number of turns of coil 1, and l1 is the length of coil 1.
Substituting the above expression into the equation for E2, we get:
E2 = - (d/dt) (μ₀N1I1/l1) × A2
E2 = - (μ₀N1A2/l1) × (dI1/dt)
E2 = -M × (dI1/dt)
Comparing this equation with the equation for the induced emf in coil 2, we can equate the terms and obtain:
M = (μ₀N1A2)/l1
This is the expression for mutual inductance (M) between coil 1 and coil 2, which depends on the permeability of free space (μ₀), the number of turns of coil 1 (N1), the cross-sectional area of each turn of coil 2 (A2), and the length of coil 1 (l1).
These derivations provide the mathematical expressions for self-inductance and mutual inductance, which are fundamental concepts in electromagnetism and are crucial in the analysis and design of electromagnetic devices and circuits.
Energy Stored in an Inductor (with derivation)
Consider an inductor with self-inductanceLand currentIflowing through it. The inductor stores magnetic energy in its magnetic field. The energy stored in the inductor can be calculated by integrating the power over time.
The power delivered to the inductor is given byP = VI, whereVis the voltage across the inductor. According to Faraday‘s law of electromagnetic induction,V = L (dI/dt). We can rewrite the power equation as:
P = LI (dI/dt)
To find the total energy stored in the inductor, we integrate this power expression over time. Let‘s assume the current changes from an initial valueI1to a final valueI2over a time intervalt1tot2.
The energy stored,W, is given by:
W = ∫ (t1 to t2) P dt
= ∫ (t1 to t2) LI (dI/dt) dt
= L ∫ (I1 to I2) I dI
= 1/2 LI^2 |_I1 to _I2
= 1/2 L (I2^2 - I1^2)
Therefore, the energy stored in an inductor is given by the formula:
W = 1/2 L (I2^2 - I1^2)
This equation shows that the energy stored in an inductor is proportional to the square of the current passing through it and the inductance of the inductor. It is important to note that energy is stored in the magnetic field generated by the current flowing through the inductor.
Transformer
A transformer is an electrical device that is used to transfer electrical energy between two or more circuits through electromagnetic induction. It consists of two or more coils of wire, known as windings, which are usually wound around a core made of magnetic material.
The main principle of operation of a transformer is based on Faraday‘s law of electromagnetic induction. When an alternating current (AC) flows through the primary winding, it generates a magnetic field that continuously changes in strength and direction. This changing magnetic field induces an alternating voltage in the secondary winding, which can be used to power electrical devices or transmit electricity over long distances.
The primary and secondary windings are electrically isolated from each other and are magnetically coupled through the core. The ratio of the number of turns in the primary winding to the number of turns in the secondary winding, known as the turns ratio (Np/Ns), determines the voltage transformation of the transformer.
Transformers are widely used in various applications, including power transmission and distribution, voltage regulation, impedance matching, and isolation. They offer efficient and reliable means of transferring electrical energy with minimal losses.
The operation of a transformer can be described using the following equations:
Vp / Vs = Np / Ns
This equation represents the voltage ratio between the primary winding (Vp) and the secondary winding (Vs), which is equal to the turns ratio (Np/Ns) of the transformer. It shows that the voltage in the secondary winding can be adjusted by changing the number of turns in the windings.
Ip * Np = Is * Ns
This equation represents the current relationship between the primary current (Ip), primary winding turns (Np), secondary current (Is), and secondary winding turns (Ns) of the transformer. It illustrates that the product of current and turns is conserved between the primary and secondary windings.
Transformers are designed to operate at specific frequencies and power ratings. They can step up or step down the voltage and current levels, depending on the application requirements. The efficiency of a transformer is high, typically above 95%, resulting in minimal power losses during the energy transfer process.
Peak and RMS Value of AC Current and Voltage
AC Current:
AC through a Resistor:
When an alternating current (AC) passes through a resistor, the current and voltage are in phase with each other. The derivation is as follows:
Consider a resistor with resistance R connected to an AC voltage source V = Vmsin (ωt), where Vmis the peak voltage and ω is the angular frequency.
The current flowing through the resistor can be determined using Ohm‘s law:
V = IR
I = V/R = (Vm/R)sin (ωt)
The current is directly proportional to the voltage and inversely proportional to the resistance. The sine function represents the time-varying nature of the AC current.
AC through a Capacitor:
When an AC passes through a capacitor, the current and voltage are out of phase with each other. The derivation is as follows:
Consider a capacitor with capacitance C connected to an AC voltage source V = Vmsin (ωt), where Vmis the peak voltage and ω is the angular frequency.
The current flowing through the capacitor can be determined using the relationship between current and the rate of change of voltage with respect to time:
I = C (dV/dt)
Differentiating the voltage equation with respect to time:
dV/dt = ωVmcos (ωt)
Substituting this back into the current equation:
I = CωVmcos (ωt)
The current is directly proportional to the rate of change of voltage and the capacitance. The cosine function represents the phase relationship between the current and voltage.
AC through an Inductor:
When an AC passes through an inductor, the current and voltage are also out of phase with each other. The derivation is as follows:
Consider an inductor with inductance L connected to an AC voltage source V = Vmsin (ωt), where Vmis the peak voltage and ω is the angular frequency.
The voltage across an inductor is given by Faraday‘s law of electromagnetic induction:
V = L (dI/dt)
Differentiating the current equation with respect to time:
dI/dt = ωImcos (ωt)
Substituting this back into the voltage equation:
V = LωImcos (ωt)
The voltage is directly proportional to the rate of change of current and the inductance. The cosine function represents the phase relationship between the current and voltage.
In summary, when an AC passes through a resistor, the current and voltage are in phase. In contrast, when an AC passes through a capacitor or an inductor, the current and voltage are out of phase. The phase relationship depends on the properties of the capacitor or inductor.
AC Voltage:
The RMS values of current and voltage are commonly used to determine the power and energy consumption of AC circuits. In resistive loads, the power dissipated can be calculated by multiplying the RMS current and RMS voltage (P = IRMS* VRMS).
AC through a Resistor:
When an alternating current (AC) passes through a resistor, the current and voltage are in phase with each other. The derivation is as follows:
Consider a resistor with resistance R connected to an AC voltage source V = Vmsin (ωt), where Vmis the peak voltage and ω is the angular frequency.
The current flowing through the resistor can be determined using Ohm‘s law:
V = IR
I = V/R = (Vm/R)sin (ωt)
The current is directly proportional to the voltage and inversely proportional to the resistance. The sine function represents the time-varying nature of the AC current.
AC through a Capacitor:
When an AC passes through a capacitor, the current and voltage are out of phase with each other. The derivation is as follows:
Consider a capacitor with capacitance C connected to an AC voltage source V = Vmsin (ωt), where Vmis the peak voltage and ω is the angular frequency.
The current flowing through the capacitor can be determined using the relationship between current and the rate of change of voltage with respect to time:
I = C (dV/dt)
Differentiating the voltage equation with respect to time:
dV/dt = ωVmcos (ωt)
Substituting this back into the current equation:
I = CωVmcos (ωt)
The current is directly proportional to the rate of change of voltage and the capacitance. The cosine function represents the phase relationship between the current and voltage.
AC through an Inductor:
When an AC passes through an inductor, the current and voltage are also out of phase with each other. The derivation is as follows:
Consider an inductor with inductance L connected to an AC voltage source V = Vmsin (ωt), where Vmis the peak voltage and ω is the angular frequency.
The voltage across an inductor is given by Faraday‘s law of electromagnetic induction:
V = L (dI/dt)
Differentiating the current equation with respect to time:
dI/dt = ωImcos (ωt)
Substituting this back into the voltage equation:
V = LωImcos (ωt)
The voltage is directly proportional to the rate of change of current and the inductance. The cosine function represents the phase relationship between the current and voltage.
In summary, when an AC passes through a resistor, the current and voltage are in phase. In contrast, when an AC passes through a capacitor or an inductor, the current and voltage are out of phase. The phase relationship depends on the properties of the capacitor or inductor.
Phasor Diagram in AC
A phasor diagram in AC (alternating current) represents the relationship between voltage and current phasors in an electrical circuit. It is a graphical tool used to analyze and visualize the phase and magnitude relationships between different AC quantities.
Steps:
Phasor diagrams are essential for studying AC circuits, analyzing their behavior, and solving complex problems. They help determine voltage and current relationships, power factor, reactance, and impedance. By visually representing AC quantities as phasors, engineers can simplify calculations and gain insights into circuit performance, facilitating circuit design, analysis, and troubleshooting.
Series Circuits with Combination of Resistance, Capacitance, and Inductance
In a series circuit containing a combination of resistance (R), capacitance (C), and inductance (L), the total impedance and the phase relationship between voltage and current can be analyzed. Let‘s consider the following circuit:
To analyze this circuit, we can use the concept of impedance (Z), which is the total opposition to the flow of alternating current. The impedance in a series circuit is the sum of individual impedance components.
The impedance of a resistor (R) is given by its resistance value:
ZR= R
The impedance of an inductor (L) is given by the formula:
ZL= jωL
where j is the imaginary unit (√ (-1)), ω is the angular frequency (2πf), and L is the inductance.
The impedance of a capacitor (C) is given by the formula:
ZC= 1 / (jωC)
Now, let‘s calculate the total impedance (Ztotal) of the series circuit by summing up the individual impedances:
Ztotal= ZR+ ZL+ ZC
= R + jωL + 1 / (jωC)
To determine the phase relationship between voltage and current, we can use the concept of phasors. Let‘s assume the voltage across the series circuit is V and the current flowing through it is I. We can represent V and I as phasors, denoted by V̂ and Î, respectively.
The phasor diagram will show the phase shift between V̂ and Î. The angle between V̂ and Î represents the phase difference.
By analyzing the phasor diagram and calculating the magnitude and phase difference between V̂ and Î, we can determine the behavior of the circuit. For example, if V̂ leads Î, it indicates a capacitive circuit, while if V̂ lags Î, it indicates an inductive circuit.
The total impedance and the phase relationship between voltage and current in series circuits containing a combination of resistance, capacitance, and inductance provide important insights into circuit behavior, power factor, and frequency response. These analyses are crucial for designing and troubleshooting complex AC circuits.
Series Resonance and Quality Factor
In an AC circuit, series resonance occurs when the inductive reactance (XL) and the capacitive reactance (XC) cancel each other out, resulting in a purely resistive impedance. This phenomenon leads to specific characteristics and applications in electronic circuits. Let‘s explore series resonance and the concept of the quality factor:
Series Resonance:
In a series resonant circuit, the inductive reactance (XL) and the capacitive reactance (XC) are equal in magnitude but opposite in sign. This condition can be expressed as XL = -XC.
The resonant frequency (fr) of the circuit can be calculated using the formula:
fr = 1 / (2π√ (LC))
where L is the inductance and C is the capacitance in the circuit.
At the resonant frequency, the total impedance (Z) of the circuit is at its minimum value, which is equal to the resistance (R) of the circuit. This implies that the current flowing through the circuit is maximized.
Quality Factor (Q):
The quality factor (Q) is a measure of the selectivity or sharpness of a resonant circuit. It quantifies the efficiency with which the circuit can store and transfer energy at the resonant frequency. The higher the Q value, the narrower the bandwidth and the more selective the circuit is.
The quality factor (Q) can be calculated using the formula:
Q = 2πfL / R
where f is the frequency of the AC signal, L is the inductance, and R is the resistance in the circuit.
A higher Q value indicates lower energy losses in the circuit and greater efficiency in transferring energy at the resonant frequency.
Series resonance and the quality factor find applications in various electronic devices and systems, such as filters, oscillators, and communication systems. Understanding and utilizing series resonance and the quality factor are essential in designing and optimizing these circuits for specific frequency responses and performance characteristics.
Power in AC Circuits and Power Factor
In AC circuits, the power consumed or delivered is more complex than in DC circuits due to the presence of reactive components such as inductors and capacitors. Understanding power in AC circuits and power factor is crucial for efficient power utilization. Let‘s explore power in AC circuits and the concept of power factor:
Real Power (P):
Real power represents the actual power transferred to the load and is measured in watts (W). It is responsible for performing useful work, such as producing light, heat, or mechanical work in the circuit. Real power is given by the formula:
P = Vrms × Irms × cos (θ)
where Vrms is the root mean square voltage, Irms is the root mean square current, and θ is the phase angle between the voltage and current waveforms.
Reactive Power (Q):
Reactive power represents the power exchanged between the source and the reactive components (inductors and capacitors) in the circuit. It is measured in volt-amperes reactive (VAR) and does not perform any useful work. Reactive power is given by the formula:
Q = Vrms × Irms × sin (θ)
Apparent Power (S):
Apparent power represents the total power supplied to the circuit and is the combination of real power and reactive power. It is measured in volt-amperes (VA) and is given by the formula:
S = Vrms × Irms
Power Factor (PF):
The power factor is the ratio of real power to apparent power and indicates how effectively the circuit utilizes the supplied power. It is a value between 0 and 1, where 1 represents maximum power factor or unity power factor. The power factor can be calculated as:
PF = cos (θ) = P / S
A higher power factor indicates better power utilization and reduced reactive power losses in the circuit. Power factor correction techniques are employed to improve power factor and enhance energy efficiency in AC systems.
Milikan‘s Oil Drop Experiment
Milikan‘s Oil Drop Experiment, conducted by Robert A. Millikan in 1909, determined the charge of an electron and provided evidence for the quantization of electric charge. The experiment involved suspending charged oil droplets in an electric field and observing their motion. Here is an overview of the experiment and its derivations:
Experimental Setup:

In the Milikan‘s Oil Drop Experiment, a chamber is set up with two parallel metal plates. A fine mist of oil droplets is introduced into the chamber, and some of these droplets acquire a negative charge through ionization.
The upper plate is connected to a high voltage source, creating an electric field between the plates. By adjusting the voltage, the electric field strength can be controlled.
A microscope is used to observe the motion of the oil droplets, and their speed and direction are analyzed.
Derivation 1: Equating Electric Force and Gravitational Force
The oil droplets in the chamber experience two forces: the gravitational force (Fg) and the electric force (Fe) due to the electric field. By equating these forces, we can determine the charge (q) on the droplets.
For a stationary droplet, the electric force is given by Fe= Eq, where E is the electric field strength.
The gravitational force on the droplet is given by Fg= mg, where m is the mass of the droplet and g is the acceleration due to gravity.
Equating the electric force and gravitational force, Eq = mg.
From this equation, the charge on the droplet (q) can be determined.
Derivation 2: Determining the Charge of an Electron
Milikan‘s experiment involved observing the motion of the oil droplets under the influence of the electric field. By carefully measuring the droplets‘ velocities and analyzing their motion, Millikan observed that the charges on the droplets were quantized and determined the charge of an electron (e).
He found that the charges on the oil droplets were always integral multiples of a fundamental charge. By measuring the velocities and applying the equations of motion, Millikan was able to determine the charge on each droplet and establish the charge of an electron as e = 1.602 × 10-19C.
Significance of the Experiment:
Milikan‘s Oil Drop Experiment provided direct evidence for the quantization of electric charge and determined the charge of an electron. This experiment played a crucial role in advancing our understanding of the nature of electric charge and contributed to the development of modern atomic theory.
Motion of Electron Beam in Electric and Magnetic Fields
The motion of an electron beam in the presence of electric and magnetic fields can be analyzed using the principles of electromagnetism. Here, we will derive the equations of motion for an electron beam under the influence of these fields:
Electric Field:

When an electron beam passes through an electric field, it experiences a force due to the electric field. The force on an electron with charge q in an electric field E is given by FE= qE. This force causes the electron to accelerate or decelerate depending on the direction of the electric field.
Magnetic Field:
When an electron beam passes through a magnetic field, it experiences a force due to the magnetic field. The force on an electron with charge q moving with velocity v in a magnetic field B is given by FB= qvB sin (θ), where θ is the angle between the velocity vector and the magnetic field vector. This force acts perpendicular to both the velocity and the magnetic field, resulting in a circular or helical motion.
Combined Electric and Magnetic Fields:
When an electron beam is subjected to both electric and magnetic fields simultaneously, the resulting motion is a combination of the effects of these fields. The force experienced by the electron due to the combined fields is given by F = FE+ FB.
By applying Newton‘s second law, F = ma, where m is the mass of the electron and a is its acceleration, we can derive the equations of motion for the electron beam:
For the electric field component: qE = ma
For the magnetic field component: qvB sin (θ) = ma
Since a = v/t (acceleration is the rate of change of velocity), we can rewrite the equations as:
For the electric field component: qE = mv/t
For the magnetic field component: qvB sin (θ) = mv/t
By rearranging these equations, we obtain:
For the electric field component: qE = m (v/t)
For the magnetic field component: qvB sin (θ) = mv²/t
By canceling the mass (m) from both equations, we can simplify them further:
For the electric field component: qE = v/t
For the magnetic field component: qvB sin (θ) = v²/t
These equations describe the motion of an electron beam in the presence of electric and magnetic fields. They relate the electric field, magnetic field, velocity of the electrons, and the time taken for the motion.
By solving these equations, we can determine the trajectory and behavior of the electron beam as it interacts with the electric and magnetic fields.
Thomson‘s Experiment to Determine the Specific Charge of Electrons
Thomson‘s experiment, also known as the cathode ray tube experiment, was conducted to determine the specific charge (e/m) of electrons. Here is a derivation of Thomson‘s experiment:

Setup:
The experiment involves a cathode ray tube, which consists of a vacuum-sealed glass tube with two metal electrodes: a cathode (negatively charged) and an anode (positively charged). The cathode is a source of electrons, while the anode attracts the electrons.
Derivation:
1. Electric Field: When a high voltage is applied across the cathode and anode, an electric field is established in the tube. The electric field accelerates the electrons emitted from the cathode toward the anode.
2. Motion of Electrons: The electrons, being negatively charged, experience a force due to the electric field. The force on an electron with charge q in an electric field E is given by FE= qE. This force causes the electrons to accelerate as they move towards the anode.
3. Deflection of Electrons: Inside the cathode ray tube, perpendicular to the electric field, there is a perpendicular magnetic field created by applying an external magnetic field. The magnetic field exerts a force on the moving electrons, causing them to deflect from their straight-line path.
4. Deflection Analysis: By adjusting the strength of the magnetic field and observing the amount of deflection of the electron beam, Thomson was able to determine the specific charge (e/m) of the electrons.
5. Applying Lorentz Force: The force experienced by an electron moving with velocity v in a magnetic field B is given by FB= qvB sin (θ), where θ is the angle between the velocity vector and the magnetic field vector.
6. Balancing Forces: Thomson adjusted the magnetic field strength until the magnetic force FBequaled the electric force FE(FB= FE).
7. Equating Forces: Equating the electric and magnetic forces, we have qE = qvB sin (θ).
8. Canceling Charge (q): Since the charge (q) is common on both sides, it cancels out, giving us E = vB sin (θ).
9. Velocity Analysis: By knowing the values of the electric field (E), magnetic field (B), and the angle of deflection (θ), Thomson was able to calculate the velocity (v) of the electrons.
10. Specific Charge Calculation: Finally, by dividing the known value of the charge (e) by the calculated velocity (v), Thomson obtained the specific charge (e/m) of the electrons.
Thomson‘s experiment provided significant evidence for the existence of electrons and their properties. It played a crucial role in the development of modern atomic theory and solidified the understanding of electrons as fundamental particles with a specific charge.
Quantum Nature of Radiation
The quantum nature of radiation is a fundamental concept in quantum physics that describes the behavior of electromagnetic radiation, such as light, as both waves and particles known as photons. This concept is based on several key principles:
Wave-Particle Duality:
According to the wave-particle duality principle, electromagnetic radiation can exhibit both wave-like and particle-like properties. This means that light can behave as a continuous wave with properties such as wavelength, frequency, and amplitude, as well as discrete particles (photons) with energy and momentum.
Quantization of Energy:
Quantum theory states that energy is quantized, meaning it can only exist in discrete amounts called quanta. In the case of radiation, energy is carried by individual photons, and the energy of each photon is directly proportional to its frequency. This implies that light can only be emitted or absorbed in specific energy packets corresponding to the energy of individual photons.
Photoelectric Effect:
The photoelectric effect, first explained by Albert Einstein, provided strong evidence for the particle-like nature of light. It is the phenomenon where electrons are emitted from a material when exposed to light of a certain frequency or above. The energy transfer in the photoelectric effect occurs in discrete quanta, with each photon transferring its energy to a single electron.
Photon Interference and Diffraction:
Another manifestation of the wave-particle duality is the ability of photons to interfere and diffract. Interference occurs when photons interact with each other and exhibit constructive or destructive interference patterns, similar to the interference of waves. Diffraction refers to the bending and spreading of light around obstacles or through narrow openings, indicating its wave-like behavior.
Quantum Electrodynamics:
Quantum electrodynamics (QED) is the quantum field theory that describes the interaction of light and matter. It combines quantum mechanics and special relativity to provide a comprehensive framework for understanding the quantum behavior of electromagnetic radiation and its interaction with charged particles.
The recognition of the quantum nature of radiation revolutionized our understanding of the microscopic world and laid the foundation for modern physics. It led to the development of quantum mechanics and other quantum theories, which have had far-reaching implications in various fields of science and technology.
Einstein‘s Photoelectric Equation
Einstein‘s photoelectric equation is a fundamental equation that relates the energy of photons to the kinetic energy of electrons emitted in the photoelectric effect. It can be stated as:
Ekin= hν - W
Where:
The equation states that the kinetic energy of the emitted electron is equal to the difference between the energy of the incident photon (determined by its frequency) and the work function of the material.
Stopping Potential
In the photoelectric effect, the stopping potential refers to the minimum potential difference (voltage) applied across a metal surface that can stop the flow of emitted electrons. When the stopping potential is reached, the kinetic energy of the emitted electrons becomes zero, and they can no longer overcome the opposing electric field.
The stopping potential can be calculated using the equation:
Vs= (h/ e) · f - (W/ e)
Where:
The stopping potential is directly related to the frequency of the incident photons. Higher-frequency photons have higher energy and require a higher stopping potential to prevent the electrons from reaching the collecting electrode.
Einstein‘s photoelectric equation and the concept of stopping potential provided crucial evidence for the particle-like behavior of light and contributed to the development of quantum mechanics.
Measurement of Planck‘s Constant using Stopping Potential and Frequency
The measurement of Planck‘s constant using the stopping potential and frequency involves plotting a graph of the stopping potential (V) versus the frequency (ν) of the incident light. The graph follows a linear relationship represented by the photoelectric equation:
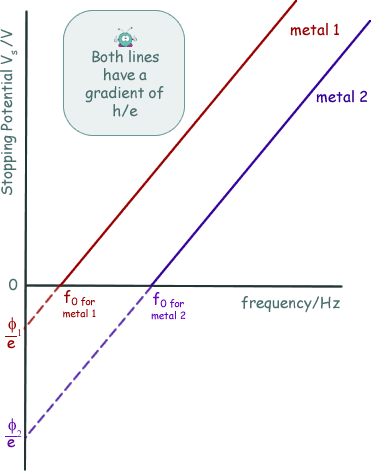
V = (h/e) * ν - φ/e
Where:
The graph exhibits a linear relationship between the stopping potential and the frequency of the incident light. The slope of the graph corresponds to (h/e), allowing the determination of Planck‘s constant. The y-intercept of the graph represents the work function of the material.
Experimental data is collected by gradually increasing the frequency of the incident light and measuring the corresponding stopping potential. The obtained data points are then plotted on a graph, and a linear regression analysis can be performed to determine the slope and y-intercept.
By analyzing the graph and calculating the slope, the value of Planck‘s constant (h) can be determined.
P-N Junction
A P-N junction is a boundary formed between a P-type semiconductor and an N-type semiconductor in a diode. It is a crucial component in semiconductor devices and plays a significant role in electronic circuits. Here are some key points about the P-N junction:
Formation:
Working Principle:
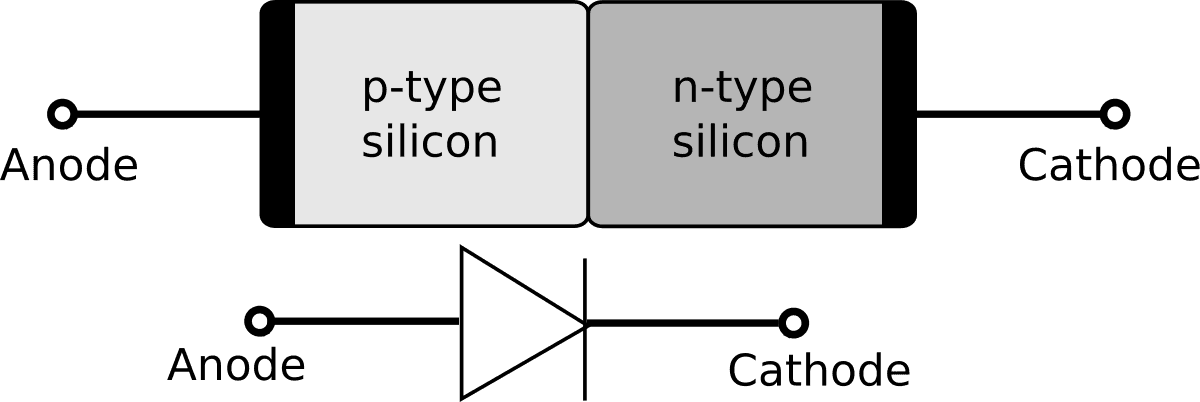
Forward Bias:
Reverse Bias:
Applications:
The P-N junction is a fundamental concept in semiconductor physics and plays a crucial role in the operation of many electronic devices.
Semiconductor Diode: Characteristics in Forward and Reverse Bias
A semiconductor diode is a two-terminal electronic component that exhibits different characteristics depending on whether it is in forward bias or reverse bias. It is widely used in electronic circuits for various applications. Here are the characteristics of a semiconductor diode in both forward and reverse bias:
Forward Bias:
Reverse Bias:
The characteristics of a semiconductor diode in forward and reverse bias are essential for understanding its behavior and its applications in electronic circuits.
Full Wave Rectification
Full wave rectification is a process of converting an alternating current (AC) into a pulsating direct current (DC) waveform. It utilizes a diode bridge or a combination of diodes to rectify both the positive and negative halves of the AC input signal. Here‘s how full wave rectification works:
Bridge Rectifier:
Full Wave Rectifier Circuit:
Advantages of Full Wave Rectification:
Full wave rectification is widely used in power supplies, battery chargers, and other electronic devices that require a steady DC voltage from an AC source.
Logic Gates
Logic gates are fundamental building blocks of digital circuits that perform logical operations on input signals to produce output signals based on predefined rules. Here are the basic types of logic gates:
NOT Gate:
OR Gate:
AND Gate:
NAND Gate:
NOR Gate:
Logic gates are the fundamental building blocks in digital logic design and are used to construct complex circuits, processors, and computer systems.
| Gate | Symbol | Truth Table | |||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| NOT |  |
| |||||||||||||||
| OR |  |
| |||||||||||||||
| AND |  |
| |||||||||||||||
| NAND |  |
| |||||||||||||||
| NOR |  |
|
Bohr‘s Theory of the Hydrogen Atom
Bohr‘s theory of the hydrogen atom revolutionized our understanding of atomic structure and the behavior of electrons. It introduced several key postulates:
Bohr‘s theory provided a framework for explaining the stability of atoms, the discrete nature of energy levels, and the observed spectral lines in the hydrogen spectrum. It laid the foundation for the development of quantum mechanics and our understanding of atomic and molecular systems.
Bohr‘s Theory of the Hydrogen Atom and Derivation of nth Orbit Radius
Bohr‘s theory of the hydrogen atom proposed a model to explain the discrete energy levels and the stable orbits of electrons around the nucleus. The derivation of the radius of the nth orbit in the hydrogen atom is as follows:
Assumptions:
Derivation:
According to Bohr‘s theory, the centripetal force acting on the electron in its orbit is balanced by the electrostatic attraction between the electron and the nucleus.
The centripetal force (Fc) is given by:
Fc = (mass of electron) x (velocity of electron)^ (radius of orbit)
The electrostatic force (Fe) is given by:
Fe = (charge of electron) x (charge of nucleus) / (4πε₀) x (1 / radius of orbit)^2
Equating Fc and Fe:
(mass of electron) x (velocity of electron)^ (radius of orbit) = (charge of electron) x (charge of nucleus) / (4πε₀) x (1 / radius of orbit)^2
From the properties of the hydrogen atom, we have:
(mass of electron) x (velocity of electron) = (reduced Planck‘s constant) x (angular momentum of electron)
Substituting this into the equation:
(reduced Planck‘s constant)^2 x (angular momentum of electron)^ (mass of electron) x (radius of orbit)^2 = (charge of electron) x (charge of nucleus) / (4πε₀)
Using the relationship between the angular momentum (mvr) and the principal quantum number (n) in terms of the Planck‘s constant (h), we have:
(h / 2π)^2 x n^ (mass of electron) x (radius of orbit)^2 = (charge of electron) x (charge of nucleus) / (4πε₀)
Simplifying the equation:
(radius of orbit)^2 = (ε₀ x (h / 2π)^ (mass of electron) x (charge of nucleus)) x n^2
Taking the square root of both sides:
radius of orbit = a₀ x n^Z
where a₀ is the Bohr radius and Z is the atomic number of the nucleus.
This equation gives the radius of the nth orbit in the hydrogen atom based on Bohr‘s theory.
Spectral Series, Excitation, and Ionization Potential
Spectral series refers to the collection of electromagnetic radiation emitted or absorbed by atoms when electrons transition between different energy levels. Each series corresponds to a specific set of transitions, resulting in characteristic spectral lines. Here‘s an overview of spectral series and related concepts:
Excitation:
Ionization:
Spectral Series in Hydrogen Atom:
The hydrogen atom is well-known for its distinct spectral series, which are named after the scientists who discovered them. Here are the major spectral series in the hydrogen atom:
Ionization Potential:
The ionization potential is the minimum energy required to completely remove an electron from an atom, resulting in the formation of a positively charged ion.
In the case of the hydrogen atom, the ionization potential corresponds to the energy required to remove the electron from the ground state (n = 1) to an infinitely far distance from the nucleus.
The ionization potential of hydrogen is approximately 13.6 electron volts (eV), or 2.18 x 10^-18 joules (J).
For other atoms, the ionization potential varies depending on the atomic structure and the specific electron being removed.
The ionization potential is an important parameter in understanding the behavior of atoms and their reactivity in chemical reactions.
Energy Levels, Emission, and Absorption Spectra
Energy levels, emission, and absorption spectra are fundamental concepts in the study of atomic and molecular physics. They help explain the behavior of atoms and the interactions between electromagnetic radiation and matter. Here‘s an overview of these concepts:
Energy Levels:
Emission Spectra:
Absorption Spectra:
Emission and absorption spectra provide valuable information about the energy states and electronic structure of atoms and molecules. They have been instrumental in the development of atomic and quantum theories, as well as applications in fields such as astronomy, chemistry, and spectroscopy.
De Broglie Theory and Wave-Particle Duality
The De Broglie theory and the concept of wave-particle duality are fundamental ideas in quantum mechanics that revolutionized our understanding of the nature of matter and energy. Here‘s an overview of De Broglie‘s theory and the concept of wave-particle duality:
De Broglie Theory:
Wave-Particle Duality:
The De Broglie theory and wave-particle duality have had profound implications in understanding the behavior of subatomic particles and the foundations of quantum mechanics. They have provided a framework for explaining phenomena such as electron diffraction, the wave nature of light, and the concept of wavefunction collapse. The ideas of De Broglie and wave-particle duality have fundamentally shaped our understanding of the quantum world.
Uncertainty Principle
The Uncertainty Principle, also known as Heisenberg‘s Uncertainty Principle, is a fundamental principle in quantum mechanics that states that there is a fundamental limit to the precision with which certain pairs of physical properties of a particle can be known simultaneously. The Uncertainty Principle is represented mathematically as:
Δx * Δp ≥ h/2π
where Δx represents the uncertainty in the measurement of the particle‘s position, Δp represents the uncertainty in the measurement of the particle‘s momentum, and h is Planck‘s constant.
The Uncertainty Principle implies that the more precisely we try to measure the position of a particle, the less precisely we can know its momentum, and vice versa. In other words, there is an inherent trade-off between the precision of measurements of position and momentum.
This principle is not a limitation of measurement techniques but is a fundamental property of the wave-particle duality of quantum objects. It arises from the wave-like behavior of particles, where their properties are described by wavefunctions that exhibit inherent uncertainty.
The Uncertainty Principle has far-reaching implications in quantum mechanics and has influenced our understanding of the nature of particles and the behavior of physical systems at the microscopic level. It has implications for various phenomena, such as the behavior of electrons in atoms, the stability of matter, and the limits of precision in measurements.
X-Rays: Nature and Production
X-rays are a form of electromagnetic radiation with high energy and short wavelength. They were discovered by Wilhelm Conrad Roentgen in 1895. Here are some key points about X-rays:
Nature:
Production:
Uses:
X-rays have revolutionized many fields, particularly in medicine, by providing valuable diagnostic information and enabling non-invasive imaging techniques.
X-Ray Diffraction
X-ray diffraction is a powerful technique used to study the atomic and molecular structure of crystalline materials. It is based on the principle of the interference of X-rays when they interact with a crystal lattice. Here are some key points about X-ray diffraction:
Bragg‘s Law:
Diffraction Pattern:
Crystal Structure Determination:
Applications:
X-ray diffraction has revolutionized our understanding of the atomic and molecular world, allowing scientists to explore the intricate details of matter and enabling advancements in various scientific and technological fields.
Bragg‘s Law derivation:
Let‘s consider a crystal lattice with parallel planes of atoms. When X-rays of wavelength λ are incident on the crystal at an angle θ, they interact with the lattice planes and undergo constructive interference if certain conditions are met.
Consider two adjacent lattice planes with a separation distance d. The incident X-rays can be treated as a plane wavefront, and the path difference between the waves scattered from the top and bottom planes can be calculated.
In the diagram below, the incident X-rays are represented by the red line, and the scattered X-rays are represented by the blue lines. The path difference between the waves scattered from the top and bottom planes is given by the vertical distance h.
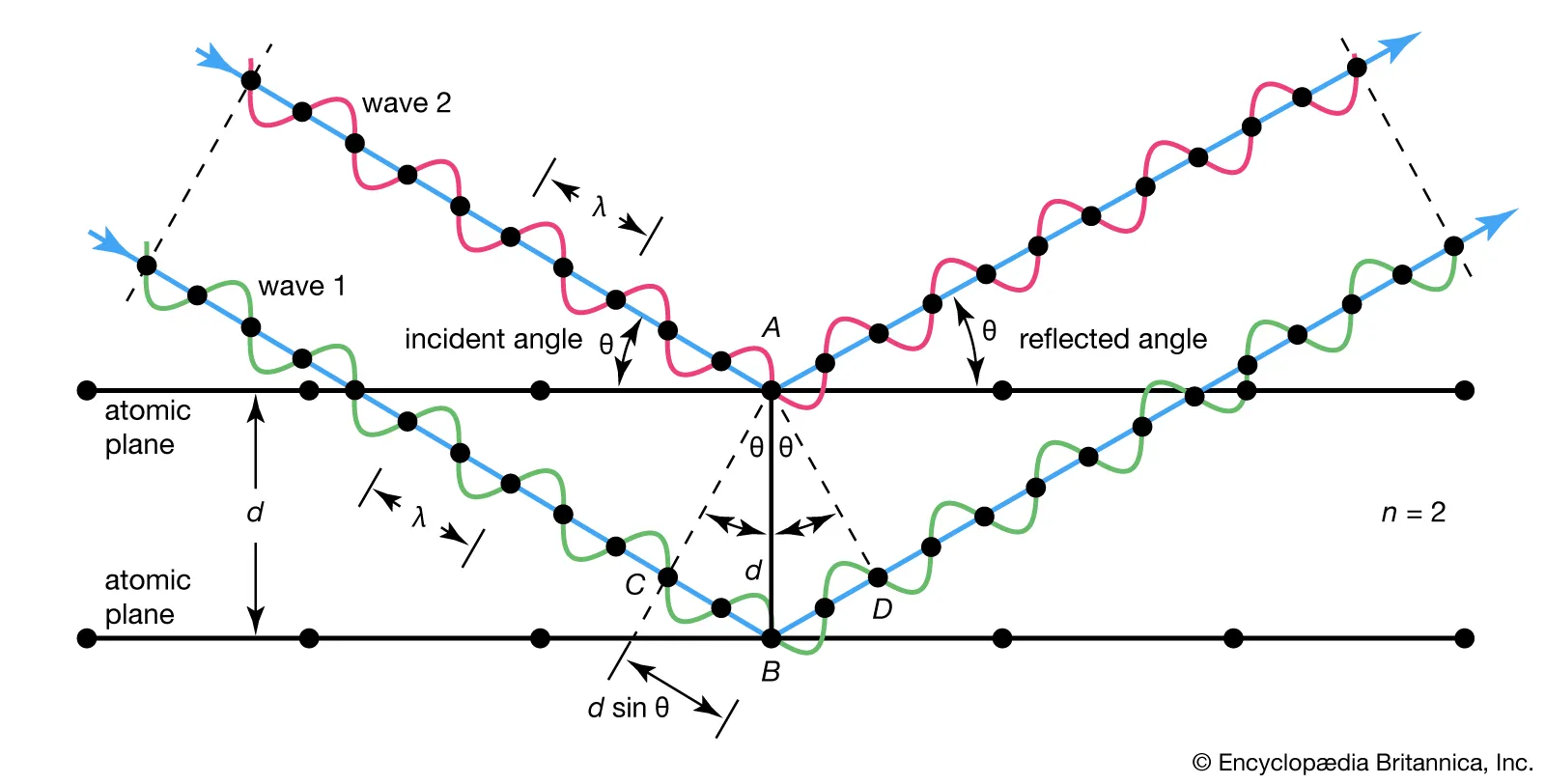
To calculate the path difference, we can consider the right-angled triangle formed by the incident X-rays, scattered X-rays, and the vertical distance h. Using basic trigonometry, we have:
sin (θ) = h / d
Since the path difference between the waves scattered from the top and bottom planes must be an integer multiple of the wavelength λ for constructive interference to occur, we have:
nλ = 2h
Combining these equations, we get:
2h = nλ
2 (d sin (θ)) = nλ
d sin (θ) = nλ / 2
This equation is known as Bragg‘s Law. It relates the spacing between the lattice planes (d), the angle of incidence (θ), the order of the diffraction (n), and the wavelength of the X-rays (λ).
Bragg‘s Law is a fundamental equation in X-ray diffraction and is widely used to determine the crystal structure of materials by analyzing the angles at which constructive interference occurs.
Alpha Particles:
Alpha particles are positively charged particles consisting of two protons and two neutrons, thus having a helium-4 nucleus. They are relatively large and heavy compared to other subatomic particles. Here are some key characteristics of alpha particles:
Beta Particles:
Beta particles are high-energy electrons (beta-minus particles) or positrons (beta-plus particles) emitted during radioactive decay. They have a much smaller mass compared to alpha particles. Here are some key characteristics of beta particles:
Gamma Particles:
Gamma particles, or gamma rays, are electromagnetic radiation of very high frequency and energy. They have no mass or charge and are often emitted along with alpha or beta particles during radioactive decay. Here are some key characteristics of gamma particles:
Alpha particles, beta particles, and gamma particles have different properties and behaviors due to their varying masses, charges, and penetration powers. They play important roles in nuclear physics, radiation detection, and medical applications.
Laws of Radioactive Disintegration:
Radioactive disintegration refers to the spontaneous decay of unstable atomic nuclei, resulting in the emission of radiation. The process follows certain laws that govern the behavior of radioactive substances. Here are the key laws of radioactive disintegration:
dN/dt = -λN
wheredN/dtis the rate of decay,Nis the number of radioactive atoms, andλis the decay constant.
Half-Life:
The half-life of a radioactive substance is the time it takes for half of the radioactive atoms in a sample to decay. It is denoted by the symbolt1/2. The concept of half-life is based on the exponential decay of radioactive atoms over time.
The relationship between the half-life and the decay constant (λ) is given by the equation:
t1/2= ln (2) / λ
Half-life is used to determine the rate of decay of radioactive substances and is an important parameter in various fields, including radiometric dating and nuclear medicine.
Mean Life:
The mean life of a radioactive substance, denoted byt, is the average time it takes for a radioactive atom to decay. It is related to the decay constant (λ) by the equation:
t = 1 / λ
The mean life represents the average lifetime of a radioactive atom before it undergoes decay.
Decay Constant:
The decay constant, denoted byλ, is a measure of the probability of decay per unit time for a radioactive substance. It represents the rate at which radioactive atoms decay.
The relationship between the decay constant and the half-life is given by the equation:
t1/2= ln (2) / λ
The decay constant is used to calculate the rate of decay, the activity of a radioactive substance, and to describe the exponential decay law.
Geiger-Muller Tube
The Geiger-Muller tube, also known as a Geiger counter or GM tube, is a device used to detect and measure ionizing radiation, particularly alpha particles, beta particles, and gamma rays. It consists of a gas-filled tube with an anode and a cathode.
Working Principle:
Features and Applications:
Limitations:
The Geiger-Muller tube is a widely used radiation detection device due to its simplicity, portability, and ability to detect various types of ionizing radiation. It has played a significant role in radiation monitoring and safety applications.
Carbon Dating
Carbon dating is a method used to determine the age of ancient artifacts and fossils by analyzing the ratio of carbon isotopes in organic materials. It is based on the principle of radioactive decay of carbon-14 (C-14) in living organisms and its subsequent decrease over time.
Principle:
Procedure:
Limitations:
Carbon dating has revolutionized archaeology and anthropology by providing a method to determine the age of ancient artifacts and fossils. It has allowed researchers to establish a chronology of human history and study the evolution of various cultures.
Medical Use of Nuclear Radiation
Nuclear radiation has several important medical applications for diagnosis, treatment, and research purposes. Here are some common medical uses of nuclear radiation:
Diagnostic Imaging:
Treatment:
Health Hazards of Nuclear Radiation
Nuclear radiation can pose health hazards if proper safety precautions are not followed. Here are some potential health hazards associated with nuclear radiation:
To minimize the health hazards associated with nuclear radiation, strict radiation safety protocols are followed in medical settings. Radiation doses are carefully controlled and monitored, and shielding measures are employed to protect both patients and healthcare professionals.
It‘s important to note that the benefits of medical uses of nuclear radiation generally outweigh the potential risks when used appropriately and under professional guidance.
Surface Waves: Rayleigh and Love Waves
Surface waves are a type of seismic waves that propagate along the Earth‘s surface. They are characterized by their motion and behavior. Two common types of surface waves are Rayleigh waves and Love waves:
Rayleigh Waves:
Love Waves:
Internal Waves: S and P-Waves
Internal waves, also known as body waves, propagate through the Earth‘s interior. The two main types of internal waves are P-waves (primary waves) and S-waves (secondary waves):
P-Waves:
S-Waves:
Both P-waves and S-waves play a crucial role in seismology and help scientists study the Earth‘s interior and understand seismic events like earthquakes.
Wave patterns of Gorkha Earthquake 2015
The Gorkha earthquake, also known as the Nepal earthquake of 2015, generated various wave patterns that were observed and analyzed by seismologists. Here are some of the wave patterns associated with the Gorkha earthquake:
1. P-Waves (Primary Waves):
2. S-Waves (Secondary Waves):
3. Surface Waves:
The specific wave patterns observed during the Gorkha earthquake would have been recorded by seismographs located in the region and analyzed by seismologists. These records provide valuable information about the characteristics and behavior of the seismic waves generated by the earthquake, which helps in understanding the earthquake‘s magnitude, focal depth, and the distribution of ground shaking in different areas.
Gravitational Waves
Gravitational waves are ripples in the fabric of spacetime caused by the acceleration of massive objects. They were predicted by Albert Einstein‘s theory of general relativity and were first directly detected in 2015. Here are some key points about gravitational waves:
Source:
Detection:
Properties:
Significance:
Gravitational waves have opened up a new field of astrophysics and are revolutionizing our understanding of the universe. They offer unique insights into the dynamics of massive objects and allow us to explore phenomena such as black hole mergers, neutron star collisions, and the early moments of the universe‘s formation.
Nanotechnology
Nanotechnology is a multidisciplinary field of science and technology that deals with the manipulation and control of matter at the nanoscale, typically in the range of 1 to 100 nanometers. Here are some key points about nanotechnology:
Scale:
Applications:
Characterization and Fabrication:
Properties and Phenomena:
Challenges and Risks:
Nanotechnology holds great promise for technological advancements and has the potential to revolutionize various industries. It offers opportunities for developing new materials, improving existing technologies, and addressing global challenges in areas such as healthcare, energy, and environmental sustainability.
Higgs Boson
The Higgs boson is a subatomic particle that was discovered in 2012 at the Large Hadron Collider (LHC) in CERN, Switzerland. It is named after physicist Peter Higgs, who proposed its existence in 1964 as part of the Higgs mechanism. Here are some key points about the Higgs boson:
Role:
Discovery:
Importance:
Properties:
Impact:
The discovery of the Higgs boson was a major achievement in the field of particle physics, confirming a fundamental aspect of our understanding of the universe and paving the way for further exploration and discoveries.

